

17. Характеристики пассивной помехи и способы борьбы с ней
Пассивные помехи – отражения от поверхностно-распределенных или от объемно-распределенных объектов. При обнаружении цели на фоне такой помехи отношение сигнал/шум от -20 до -70 дБ. Это делает необходимым подавление пассивной помехи для селекции сигналов от цели.
Способы борьбы: выбор сигнала определенной формы, пространственная селекция, использование поляризатора, регулировка усиления и частотная селекция.
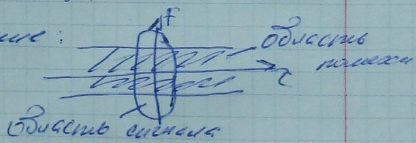
*Ослаблением пассивной помехи можно достигнуть выбором сигнала так, чтобы области перекрытия сигнала и помехи на плоскости F,τ имели минимальное перекрытие:
Пространственная селекция:
1) Отклонение Д.Н. антенны наземных РЛС вверх – это дает улучшение сигнал/помеха на 15-20 дБ
2) Метод компенсации. Применяют двулучевую антенну и учитывают высокую корреляцию пассивной помехи, принимаемую по нижней и верхней Д.Н.
К – компенсатор
помех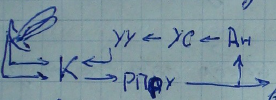
УС – устройство сравнения (?)
Ан. – анализатор
РПрУ – радиоприемное устройство
УУ – устройство управления (выбирает весовые коэфф. при вычитании сигналов в компенсаторе)
Достижимое ослабление пассивной помехи составляет 20-25 дБ.
Поляризационная селекция:
Волна РЛС имеет круговую поляризацию, т.е. ЕГи ЕВсдвинуты на 90 градусов, то при отражении от объемной цели ЕВполучает дополнительный сдвиг в 90 градусов – поулчаем пруговую поляризацию с противоположным вращением
а б
Поляризация радиоволн:
а) при отражении от цели; б) от пассивной помехи.
В СВЧ тракт ставят рециркулятор, где происходит сдвиг ещё на 90 градусов – в результате ЕГсдвигается на 180 градусов, что дает линейную горизонтальную поляризацию. При этом происходит компенсация помехи. Подавление пассивной помехи от дождя 20-25 дБ.
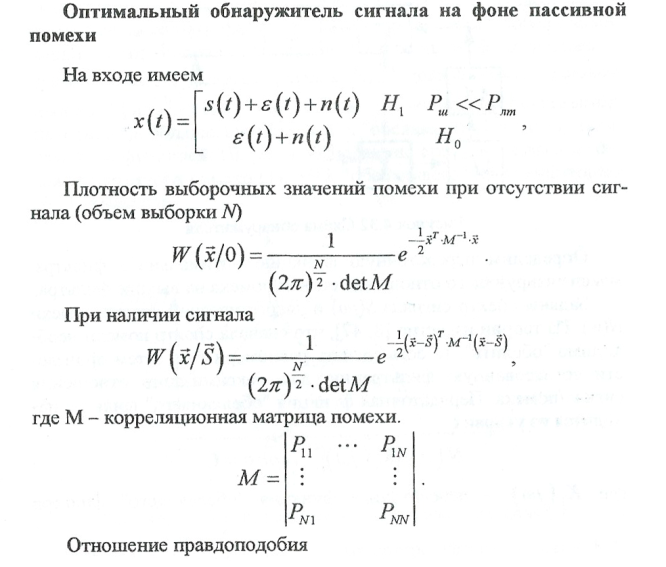
18. Оптимальный фильтр, максимизирующий отношение сигнал/пассивная помеха
Имеем спектр сигнала S(jω) и энергетический спектр помехиN(w). Сначала спектр необходимо сделать равномерным ("обелить"), а затем произвести согласованную фильтрацию для максимизации отношения сигнал/помеха.
 ,
где
,
где - передаточная функция "обеляющего"
фильтра.
- передаточная функция "обеляющего"
фильтра.
Отсюда
следует:

Согласованный фильтр с сигналом, прошедшим "обеляющий" фильтр:

Оптимальный фильтр:

Таким образом,
передаточная функция оптимального
фильтра состоит из соединения "обеляющего"
фильтра и фильтра, согласованного с
сигналом. "Обеляющий" фильтр
нереализуем, т.к. на частотах, кратных
FП/2, должен иметь
бесконечный коэффициент усиления.
Поэтому на практике используется
режекторный фильтр, у которого схожая
передаточная функция.
Спектры на выходе фазового детектора помехи (1), АЧХ "обеляющего" (2), режекторного (3) фильтров.
*Он просил ещё дополнить формулами с корреляционной функцией и матрицей:
19. Оценка эффективности устройств сдц
Основные показатели: коэффициент подавления КП, коэффициент улучшенияIи скоростная характеристика.
Коэффициент
подавления пассивной помехи–
отношение мощности помехи на выходе
устройства селекции движущихся целей
(СДЦ) к мощности помехи на входе
в дБ:

Коэффициент
улучшения– учитывает прохождение
через фильтр СДЦ сигнала и помехи. Равен
отношению мощностей сигнал/помеха на
выходе СДЦ к сигнал/помеха на входе , гдеkC– коэффициент передачи фильтра СДЦ по
сигналу.
, гдеkC– коэффициент передачи фильтра СДЦ по
сигналу.
Скоростная характеристика– зависимость коэффициента передачи СДЦ от скорости цели. Для импульсных РЛС характерно наличие "слепых" скоростей цели, при которых коэффициент передачифильтраравен 0. Условие возникновения слепых скоростей:

То есть доплеровский сдвиг кратен частоте повторения зондирующих импульсов.