

24. Функции неопределенности простого радиоимпульса и пачки импульсов
Одиночный радиоимпульс:

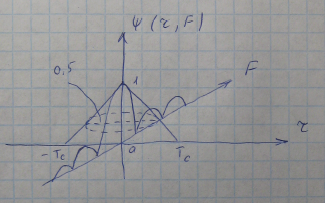
Функция неопределенности прямоугольного импульса:
Сигнал в виде пачки импульсов:
 , где
, где -
ФН одиночного импульса
-
ФН одиночного импульса
25. Сложные зондирующие сигналы и их применение
Сложные сигналы – сигналы с базой много больше 1. База сигнала – произведение ширины эффективногоспектра на его длительность. К сложным относятся сигналы:
Непрерывные:
ЛЧМ – Линейная Частотная Модуляция;
НЛЧМ - НеЛинейная Частотная Модуляция;
Дискретные:
ФМ2 – бифазные фазоманипулированные сигналы (m= 2 – число фаз)*МФМ – многофазные фазоманипулированные сигналы (m>2)
ДЧ – дискретные частотные сигналы.
Зондирующие сигналы делятся на узкополосные, у которых FC<<f0и сверхширокополосные, у которых
 ,
где
,
где -
верхняя и нижняя частота спектра сигнала.
-
верхняя и нижняя частота спектра сигнала.
Сверхширокополосные сигналы применяются в специфических областях радиолокации: подповерхностной и для классификации объектов. Сложные сигналы в радиолокации стоит применять только в случае, когда имеется противоречие между требованием высокой разрешающей способности по дальности и ограниченной пиковой мощностью.
26. Постановки задачи измерения координат. Критерий оптимальности
Задача измерение координат объектов решается после обнаружения объекта или одновременно с ним. Измеряются дальность, скорость. угловые координаты объектов и, если необходимо, то их производные. Это происходит путём оценки параметров приходящего сигнала: задержки, сдвига частоты и амплитуды. На входе измерителя наблюдается смесь:
 при 0≤t≤T,
при 0≤t≤T,
где
 -
сигнал, содержащий неизвестный параметр
-
сигнал, содержащий неизвестный параметр ;n(t) – шумовая
помеха; Т – время наблюдения обычно
равное длительности сигнала (пачка
импульсов)
;n(t) – шумовая
помеха; Т – время наблюдения обычно
равное длительности сигнала (пачка
импульсов)
Параметр
 может быть: задержкой сигнала τ (по нему
определяется дальность), сдвигом частотыF(определяется скорость),
амплитудой или фазой приходящего сигнала
(оцениваются углы объектов).
может быть: задержкой сигнала τ (по нему
определяется дальность), сдвигом частотыF(определяется скорость),
амплитудой или фазой приходящего сигнала
(оцениваются углы объектов).
Оптимальным считается измеритель, обеспечивающий минимум дисперсии ошибки или среднеквадратичного значения.
Суммарная
ошибка измерениявычисляется так: ,
где
,
где
 -
динамическая ошибка;
-
динамическая ошибка;
 -
ошибка съема;
-
ошибка съема;
 -
флуктуационная ошибка;
-
флуктуационная ошибка;
 -
инструментальная ошибка;-
может быть неправильно
-
инструментальная ошибка;-
может быть неправильно
Шумовая ошибкахарактеризует потенциальную точность измерения, оцениваемую дисперсией:
 , где
, где -
условная плотность оценок θ при условии,
что принимаемая выборка равна
-
условная плотность оценок θ при условии,
что принимаемая выборка равна .
.
 - функция правдоподобия, зависящая от
параметра
- функция правдоподобия, зависящая от
параметра .
Значение
.
Значение ,
соответствующее максимуму этой функции,
определяетсякак оценка максимального
правдоподобия
,
соответствующее максимуму этой функции,
определяетсякак оценка максимального
правдоподобия
 .Это значение можно найти через уравнение
на графике. Эта оценка обладает следующими
свойствами: достаточности (чем больше
отношение сигнал/шум, тем оценка ближе
к истинному значению); несмещенности
(нет систематического смещения) и
эффективности (дисперсия ошибки
минимальна). Таким образом, оценка
максимального правдоподобия является
оптимальной, а измеритель, вычисляющий
эту оценки, так же оптимален.
.Это значение можно найти через уравнение
на графике. Эта оценка обладает следующими
свойствами: достаточности (чем больше
отношение сигнал/шум, тем оценка ближе
к истинному значению); несмещенности
(нет систематического смещения) и
эффективности (дисперсия ошибки
минимальна). Таким образом, оценка
максимального правдоподобия является
оптимальной, а измеритель, вычисляющий
эту оценки, так же оптимален.
27. Метод максимального правдоподобия. Структура оптимального измерителя
 - функция правдоподобия, зависящая от
параметра
- функция правдоподобия, зависящая от
параметра .
Значение
.
Значение ,
соответствующее максимуму этой функции,
определяется как оценка максимального
правдоподобия
,
соответствующее максимуму этой функции,
определяется как оценка максимального
правдоподобия .
Это значение можно найти через уравнение
на графике. Эта оценка обладает следующими
свойствами: достаточности (чем больше
отношение сигнал/шум, тем оценка ближе
к истинному значению); несмещенности
(нет систематического смещения) и
эффективности (дисперсия ошибки
минимальна). Таким образом, оценка
максимального правдоподобия является
оптимальной, а измеритель, вычисляющий
эту оценки, так же оптимален.
.
Это значение можно найти через уравнение
на графике. Эта оценка обладает следующими
свойствами: достаточности (чем больше
отношение сигнал/шум, тем оценка ближе
к истинному значению); несмещенности
(нет систематического смещения) и
эффективности (дисперсия ошибки
минимальна). Таким образом, оценка
максимального правдоподобия является
оптимальной, а измеритель, вычисляющий
эту оценки, так же оптимален.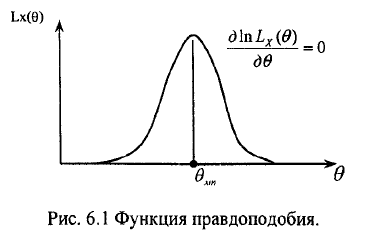
Измеритель
должен вычислять натуральный логарифм
функции правдоподобия (существенно
упрощает реализацию). Схема измерителя
максимального правдоподобия:
Он состоит из вычислителя логарифма функции правдоподобия и вычисления оценки. Реальные измерители координат являются техническими реализациями этого измерителя.