

10. Постановка задачи обнаружения. Ошибки, возникающие при обнаружении
Задача обнаружения возникает в связи с тем, что принимающий от цели сигнал имеет малую мощность и маскируется шумами и помехами, мощность которых соизмерима с мощностью сигнала. Обнаружение формируется как проверка гипотезы Н1о наличии сигнала на входе приемника напряжении против гипотезы Н0об отсутствии сигнала наличия одной помехи.
Задача состоит
в установлении факта наличия либо
отсутствия сигнала от цели.
Устройство
обработки – копит энергию сигнала.
Пороговое устройство – принимает
решение о наличии сигнала путём сравнения
накопленного напряжения.
Ошибки: принятие неправильного решения; пропуск сигнала (ошибка 2-го рода – сигнал есть, но порог не превышен)

Вероятность ложной тревоги (ошибка 1-го рода) равна вероятности принятия решения, что сигнал есть, а он отсутствует (только шум)
 ,
где
,
где -
распределение шума на входе порогового
устр-ва
-
распределение шума на входе порогового
устр-ва
Распределение шума на входе порогового устройства
Задачи обнаружения:
-выбор оптимальной структуры устройства обработки
-определение величины порога в соответствии с некоторым критерием
-анализ характеристик обнаружителя и возможности его реализации.
11. Отношения правдоподобия, критерии оптимальности

Левая часть и есть отношение правдоподобия, вычисляется при приеме выборки Х и сравнивается с пороговым уровнем (ПУ, правая часть). Если оно больше или равно ПУ, то принимается решение об отсутствии сигнала. При использовании критерия минимального среднего риска величина ПУ определяется платами за неправильные решения и априорными вероятностями наличия и отсутствия сигнала (не применяется на практике, т.к. априорные вероятности неизвестны). Используют критерий оптимальности, он же критерий Неймана-Пирсона: обнаружитель является оптимальным, который при заданной вероятности ложной тревоги и отношения сигнал/шум на входе обеспечивает максимальную вероятность правильного обнаружения. При каждой новой выборке вычисляется отношения правдоподобия и сравнивается с верхним и нижним порогом, определяемыми Рл.тр. и Робн.. Если один из порогов достигается – выносится соответствующее решение, если нет – процедура продолжается до следующей выборки; Таким образом, оптимальный обнаружитель вычислит отношения правдоподобия.
Формула критерия Неймана-Пирсона:

 - возможно ошибка
- возможно ошибка
12. Обнаружение одиночных импульсов. Схемы обнаружителей
3 типа сигналов:
1) Сигнал с известными параметрами
Модель:
 при 0<t<T
при 0<t<T
Где
 -
известные в точке приема параметры
(амплитуда, частота, задержка, фаза
сигнала), но факт о наличии сигнала
неизвестен. Логарифм отношения
правдоподобия:
-
известные в точке приема параметры
(амплитуда, частота, задержка, фаза
сигнала), но факт о наличии сигнала
неизвестен. Логарифм отношения
правдоподобия: где
где - энергия сигнала
- энергия сигнала
 - корреляционный интеграл, который
представляет собой достаточную
статистику. Структурная схема обнаружителяZ(T):
- корреляционный интеграл, который
представляет собой достаточную
статистику. Структурная схема обнаружителяZ(T):
Состоит из
перемножителя Х входного сигнала на
опорный, интегратора и порогового
устройства ПУ, сравнивающего в момент
времени t=T.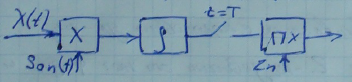
2) Сигнал со случайной начальной фазой
Модель:
 при 0<t<T
при 0<t<T
 -
случайная начальная фаза. Отношения
правдоподобия зависит от фазы сигнала.
-
случайная начальная фаза. Отношения
правдоподобия зависит от фазы сигнала.
 - логарифм функции правдоподобия.
- логарифм функции правдоподобия.
I0 – функция Бесселя 1-го рода 0-го порядка.Z–огибающая накопленного сигнала, равная
 ,
гдеXиY–
косинусная и синусная составляющая.
,
гдеXиY–
косинусная и синусная составляющая.


Логарифм функции Бесселя как функция Zсоответствует характеристике детектора огибающей. Схема оптимального обнаружителя сигнала со случ. начальной фазой:
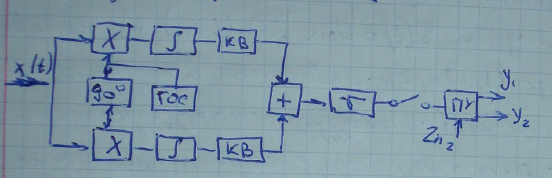
Опорные колебания сдвинуты на 90 градусов. В корреляторах происходит накопление сигнала, выделение его квадратурных составляющих. Далее вычисляется огибающая и сравнивается с пороговым уровнем. Особенности: Zне зависит от начальной фазы, обеспечивает максимальное отношение сигнал/шум.
3) Сигнал со случайной фазой и амплитудой
Тут случайна ещё и амплитуда, распределение которой известно. Обычно принимается, что амплитуда распределена по законы Релея, структура та же, что и в предыдущем случае.
(график сигналов при необходимостиможно найти в 1 вопросе)