

32. Измерение скорости. Классификация методов измерения скорости
Измерение скорости может осуществляться двумя методами.
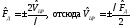
Первый метод
заключается в вычислении скорости через
приращение дальности до цели за малый
интервал времени
 :
:

Второй метод основан на использовании доплеровского прямого измерения сдвига частоты:
Классификация измерителей скорости:
33. Многоканальные и следящие измерители скорости объектов
Многоканальный фильтровой измеритель скорости:
Обозначения: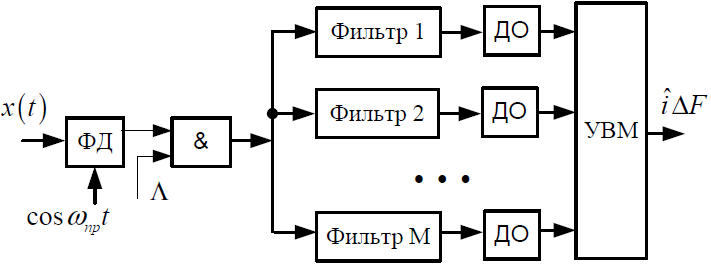
ФД – фазовый детектор;
ДО – детектор огибающей;
УВМ – устройство выбора максимума.
Такое
устройство обработки является
корреляционно-фильтровым. Оценка частоты
производится по номеру канала с
максимальным выходным сигналом.
Многоканальный измеритель при М>20
реализуется в виде вычислителя дискретного
преобразования Фурье (ДПФ). Практически
реализуется в виде быстрого преобразования
Фурье (БПФ). При размере выборки Nчерез ДПФ запишется так:
ДПФ запишется так:
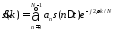 , гдеan
– весовые коэффициенты.
, гдеan
– весовые коэффициенты.
Каждому
коэффициенту
 соответствует
полоса эквивалентного фильтра
соответствует
полоса эквивалентного фильтра
Следящие измерители скорости
СМ – смеситель;
ЧД – частотный детектор; ФОП – фильтр
оценки доплеровского сдвига; ГУН –
генератор, управляемый напряжением; УП
– устройство поиска; УПЧ – усилитель
промежуточной частоты.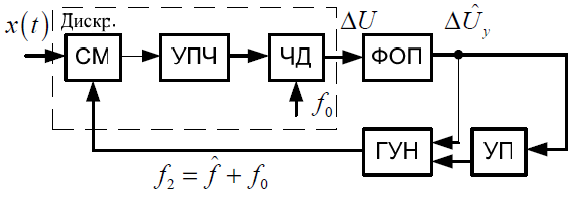
Сигнал на
входе устройства имеет вид
ГУН вырабатывает опорное напряжение. После преобразования усиленный сигнал ПЧ поступает на частотный детектор, являющийся частотным дискриминатором.
Сигнал ошибки
 поступает на фильтр оценки доплеровского
сдвига. На его выходе напряжение
пропорционально доплеровскому сдвигу
(скорости объекта). Этим напряжением
подстраивается ГУН, чтобы свести ошибку
оценки
поступает на фильтр оценки доплеровского
сдвига. На его выходе напряжение
пропорционально доплеровскому сдвигу
(скорости объекта). Этим напряжением
подстраивается ГУН, чтобы свести ошибку
оценки к нулю. Устройство поиска и захвата до
начала слежения перестраивает ГУН по
всему диапазону доплеровских сдвигов,
пока сигнал
к нулю. Устройство поиска и захвата до
начала слежения перестраивает ГУН по
всему диапазону доплеровских сдвигов,
пока сигнал не попадет в полосу УПЧ.
не попадет в полосу УПЧ.
34. Анализ ошибок измерения скорости
Расчет ошибок многоканального измерения:
1) Шумовая
ошибка:
2) Ошибка
дискретности:

3) Ошибка за
счет нестабильности частоты
приемопередатчика:

Суммарная
ошибка:

Расчет ошибок следящего измерителя:
Динамическая ошибка (когда меняется доплеровский сдвиг)
 где
где

Шумовая ошибка
35. Методы измерения угловых координат
1) Амплитудный метод максимума.
Измеряется
угловое положение антенны, соответствующее
максимуму выходного сигнала, относительно
некоторого начального угла, принимаемого
за нулевое значение – таким образом
определяется направление на цель. Метод
максимума реализуется в обзорных РЛС.
Амплитуда отраженного сигнала на выходе
РПрУ при сканировании антенны с постоянной
скоростью зависит от угла
 :
:
FA
− диаграмма направленности антенны.![]()
2) Метод сравнения.
Формируются 2 диаграммы направленности, пересекающиеся на некотором уровне. Соответствующее этому уровню угловое расстояние между максимами диаграмм θ0. Прямая, проходящая через начало координат (θ=0) и точка пересечения диаграмм, называется равносигнальным направлением (РСН). Сигналы, в каждой из диаграмм, поступают на два приёмных канала и устройство сравнения амплитуд выходных сигналов. Отсюда название – “метод сравнения”.
Принцип работы: Если цель находится на РСН, то сигналы, поступающие на устройство сравнения, одинаковы по уровню. Напротив, если цель, не находится на РСН, то усиление в направлении на цель одной антенны больше, чем другой, и амплитуды выходных сигналов РпрУ различны. Поэтому на выходе устройства сравнения формируется напряжение пропорциональное углу отклонения цели от РСН.
3) Метод минимума.
В РЛС не применяется.
4) Принцип фазового измерения углов.
Разность фаз
сигналов, приходящих в точки А и В,
определяется разностью хода лучей и
равна: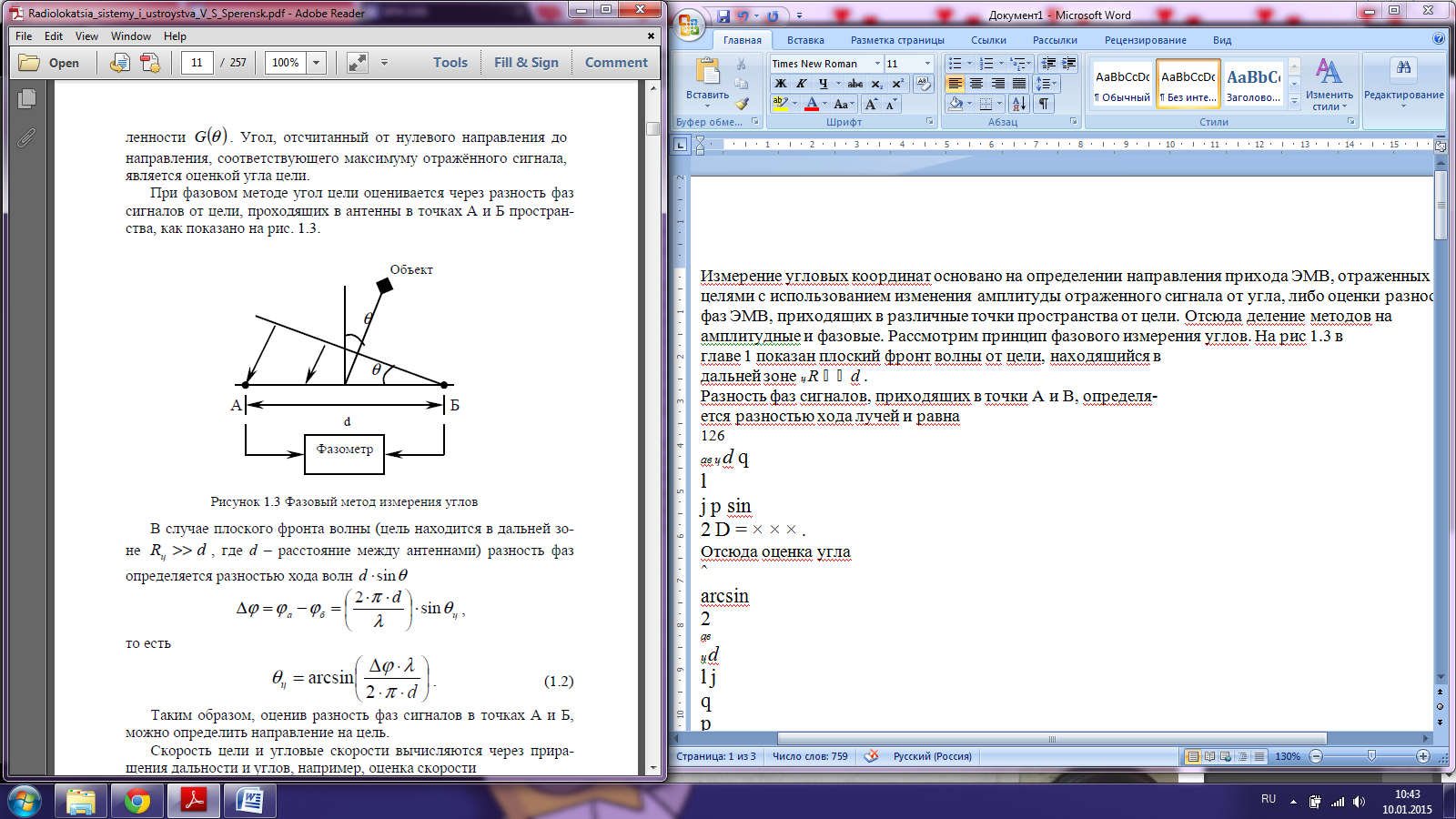

Отсюда оценка
угла:
 .
.
Таким образом, оценив разность фаз можно определить направление на цель. При узконаправленных антеннах измерение углов может производиться по изменению амплитуды приходящего сигнала.