

36. Анализ ошибок измерения углов рлс.
В неследящих измерителях угла среднеквадратичная ошибка при действии "белого" шума со спектральной плотностью N0равна:
 , гдеb– коэффициент,
определяемый формой главного лепестка
диаграммы.
, гдеb– коэффициент,
определяемый формой главного лепестка
диаграммы.
Шумовая ошибка тем меньше, чем уже диаграмма направленности и чем больше отношение сигнал/шум. Динамическая ошибка в неследящих измерителей принимают равной 0.
При цифровом
съеме угла имеется ошибки дискретности:
В импульсных
РЛС имеется ошибка дискретности за счёт
импульсного характера излучения,
определяемая шириной диаграммы и числом
импульсов в пачке:

В следящих
измерителях и импульсных РЛС шумовая
ошибка слежения по углу описывается
выражением:
где FАСН– эквивалентная полоса пропускания системы автосопровождения, FАСН= 1Гц;
FП– частота повторения импульсов;
k – коэффициент, зависящий от типа следящего измерителя:
-для моноимпульсного АСН k=0,64;
-для конического сканирования k = 0.19.
37. Системы спутниковой радионавигации.
49 в ответах:
Вычисляются 3 координаты x,y,zи время навигационной системы. Чтобы определились трехмерные координаты, используются 4 спутника (GPS) (в лекции – минимум 3). Чтобы всё работало нормально, надо делать подстройку времени на командном пункте (американцы делают ее раз 1 месяц).
Из последней лекции:
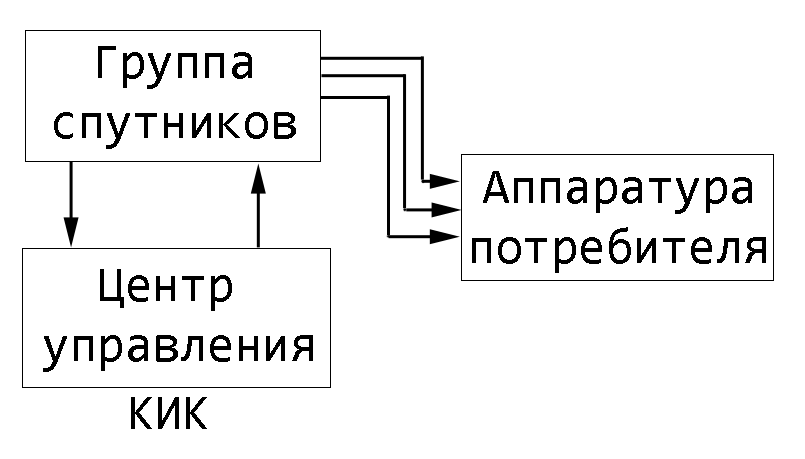
Используются 24 спутника, чтобы покрыть всю землю.
КИК – командный измерительный комплекс
Излучение к потребителю идёт от 3х спутников, после чего осуществляется оценка задержки. Формируется 2 М-последовательности и складываются по mod2 (код Голда):
 .
.
В GPSтактовая частота 10 МГц (полоса сигнала). В ГЛОНАСС - 1.25 МГц (задержка определяет ширину спектра)
Главная проблема системы – синхронизация:
- Нужна фазовая подстройка;
- Нужна подстройка по такту;
- Нужна синхронизация по коду.