

4. Эпр элементарных отражателей и сложных объектов
Простые ЭПР – Рассчитываются аналитически, а Сложные ЭПР – вычисляются с помощью ЭВМ или измеряются экспериментально. Простые цели: сфера, шар, уголковый отражатель, плоский лист. Сложные – большинство реальных целей. В случае игольчатого луча РЛС разрешаемый объем (рис. 2.5) представляет собой цилиндр и определяется величиной телесного угла, расстоянием до цели Rи разрешающей способности по дальности, равной:
 ,
, - длительность зондирующего сигнала.
- длительность зондирующего сигнала.
Телесный
угол антенного луча равен
 ,
, -
эффективная площадь антенны.
-
эффективная площадь антенны.
Разрешаемый
объём: .
.
Если объем
цели меньше разрешаемого объекта, то
такая цель называется точечной. Если
размер цели много больше разрешающего
объема, то такая цель называется
распределенной. Длина волны, соизмеримая
с длиной окружности 2πа (а – радиус
сферы), называется областью френелевских
колебаний. Площади отражения сложных
целей являются сложными функциями угла
падения, длины волны, размеров объекта
и радиуса цели. Для уменьшения
обнаруживаемости объектов применяются
специальные методы уменьшения ЭПР.
Применение нетрадиционных малоотражающих
материалов, всевозможные поглощающие
радиоволны покрытия, специальная
аэродинамика летательного аппарата 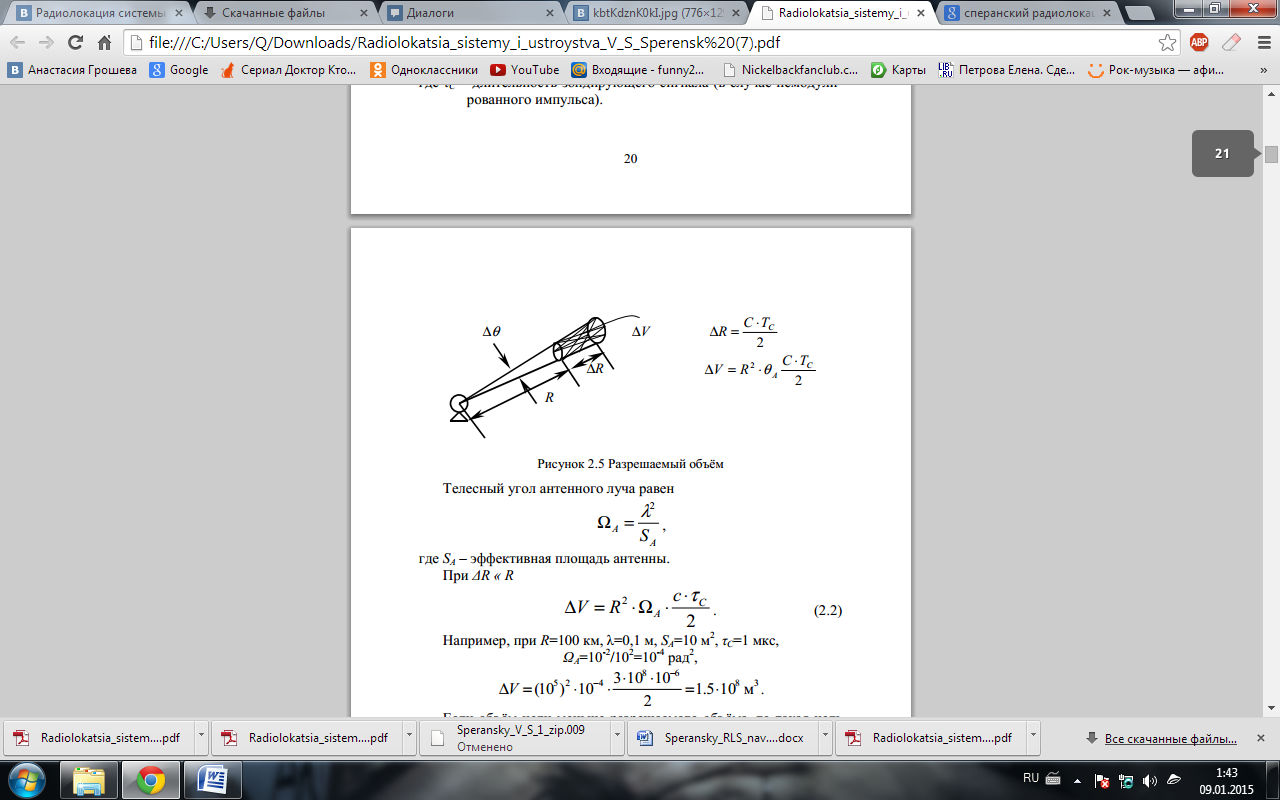
5. Поверхностно- и объёмно-распределённые объекты
Эти объекты могут быть либо полезными целями (облачный фронт в метеолокации), либо создавать пассивные помехипри наблюдении малоразмерной цели на фоне распределенного объекта (самолет в облаке диполей, низколетящая цель над морской поверхностью).
Для оценки
ЭПР объёмно- и поверхностно-распределенных
объектов вводится понятие удельной
опережающей способности, то есть ЭПР
единицы объема 1м3– σуд(м2/м3) для объемно-распределительного
объекта и ЭПР площади 1 м2поверхностно-распределенного объекта.
Удельная ЭПР существенно зависит от
физических свойств отражателей и от
длины волны. ЭПР объемно-распределенного
объекта: .
Для оценки ЭПР поверхностно-распределенного
объекта, первый отраженный импульс
приходит с задержкой
.
Для оценки ЭПР поверхностно-распределенного
объекта, первый отраженный импульс
приходит с задержкой , гдеR- наклонная дальность.
Тогда ЭПР поверхностно-распределенного
объекта определяется в виде:
, гдеR- наклонная дальность.
Тогда ЭПР поверхностно-распределенного
объекта определяется в виде: , где
, где - ширина Д.Н. антенны РЛС.
- ширина Д.Н. антенны РЛС.
6. Требования, предъявляемые к системам обзора, способы обзора
Требования, предъявляемые к системам обзора определяются её назначением, местом установки, помеховой обстановкой и характеристиками целей. К тактическим характеристикам относятся: зона действия РЛС, период обзора, разрешающая способность по координатам, помехозащищенность, пропускная способность, надёжность и стоимость.Требования к обзорности РЛС: максимальная и минимальная дальность действия, разрешающая способность по дальности, по углу и по скорости, вероятности ложной тревоги, правильного обнаружения, высота объектов (мин и макс), период повторения, ширина спектра и длительность зондирующего импульса, диаграмма направленности. Обзор пространства производится периодически. К обзорным РЛС относятся РЛС дальнего обнаружения, управления воздушным движением, метеорологические и самолетные для радионавигации.