

§§ Манипуляторы. § Манипуляторы для смены заготовок
Применяются, как правило, в безлюдной технологии в механообрабатывающем производстве, при обработке тел вращения на многооперационных, кругло или внутришлифовальных станках с ЧПУ.
Выполняются в виде манипуляторов с поворотным или рычажным захватом.
В большинстве многооперационных станков используют различные схемы автоматической смены столов-спутников с одно-, двух- или много загрузочными устройствами. Заготовки предварительно устанавливаются, закрепляются на столе-спутнике, а затем переносятся в рабочую позицию, что позволяет сменять заготовки любой сложной формы (например, заготовки корпусных деталей).
Примеры загрузочных устройств
на многооперационных станках с ЧПУ
при обработке деталей сложной формы.

Поперечно-продольная схема.
1 – станок
2 – заготовки
3 – шпиндель с инструментом
4 – транспортер

Поперечная схема
1 – станок
2 – стол-спутник
§ Манипуляторы для смены инструментов
К ним относятся:
1) Накопители инструментов (револьверные головки, инструментальные магазины, многопозиционные резцедержатели).
2) Автооператоры (манипуляторы с захватными механизмами).
3) Зажимные механизмы в шпинделе.
4) Транспортные устройства.
Рассмотрим один из вариантов смены инструмента на примере работы автооператора станка типа «ОЦ» (обрабатывающей центр).
Происходит при остановке шпинделя:
1. Шпиндельная головка поднимается в крайнее верхнее положение – позицию смены. Отработавший инструмент вводится в правый захват автооператора и освобождается от зажима в шпинделе.
![]()
2. Включается двигатель автооператора, происходит зажим инструментов в захватах руки, движение руки вдоль оси шпинделя, вследствие чего инструмент вместе с оправкой извлекается из шпинделя и из втулки перегружателя.

3. Происходит поворот руки на 1800, инструменты отработавший и вступающий в работу меняются местами.

4. Рука автооператора втягивается в прежнее положение, т.е. новый инструмент вводится в шпиндель, а отработавший – во втулку перегружателя, захваты разжимаются.
![]()
5. Инструмент зажимается в шпинделе, головка идет вниз для обработки. Перегружатель относит отработавший инструмент в магазин.

§ Проектирование и расчет манипуляторов
Характерными особенностями расчета манипуляторов являются:
- короткое время цикла работы.
- непостоянство массы и момента инерции исполнительных органов.
- большие динамические нагрузки, колебания и удары в механизмах приводов при разгоне, торможении, реверсе (т.е. при переходных режимах работы).
Приводы манипуляторов – это системы, состоящие из двигателя, передаточного механизма и устройства управления. В качестве двигателей используют гидро и пневмоцилиндры, гидропневмодвигатели с вращательным или касательным движением. К передаточным механизмам относят редукторы, зубчато-реечные, кривошипные, кулачковые и т.д. передачи.
Переходные режимы работы манипуляторов характеризуются законом изменения скорости V их движения за время t.
Наибольшее быстродействие механизма достигается, когда переходный процесс состоит из двух этапов:
- разгон с максимально возможным ускорением до скорости Vmax;
- торможение с наибольшим замедлением до полной остановки.
Особенностью манипуляторов является их неуравновешенность из-за переменности масс исполнительных органов, вследствие чего возникает дополнительный момент Мн – момент неуравновешенности.
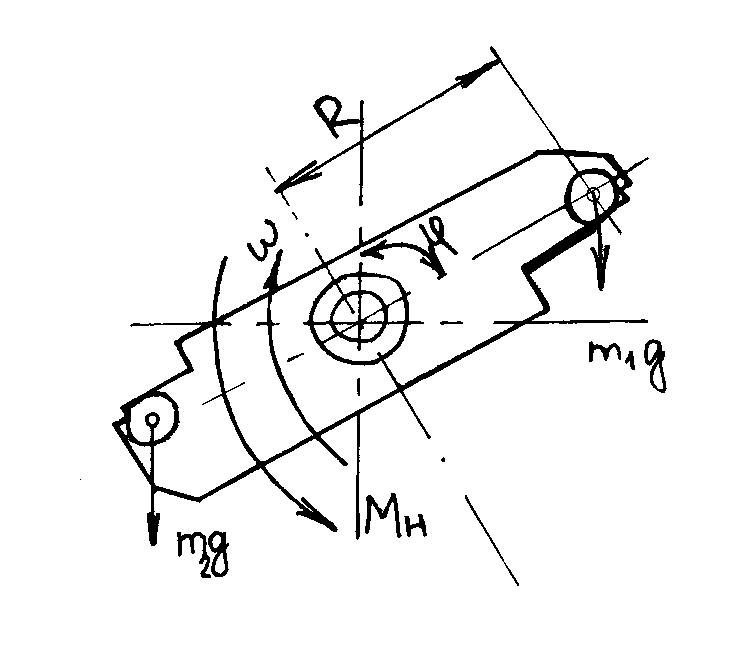
Схема определения Мн для автооператора механизма смены инструментов с горизонтальной осью вращения.
 ,
где
,
где
m1, m2 – масса инструментов;
R – расстояние между осями автооператора и инструмента;
φ – угол наклона автооператора;
g – ускорение силы тяжести.
В зависимости от положения автооператора направление действия Мн может меняться.
Характеристики приводов с гидоропневмоцилиндрами выбирают по расчетным значениям параметров исполнительных механизмов манипуляторов: наибольшей скорости Vmax и предельной нагрузке Fmax.
По этим значениям и выбранному давлению Р определяют диаметр цилиндра:
 ,
где
,
где
в – коэффициент типа уплотнений штока цилиндра (1,1÷1,5).
Затем вычисляют расход жидкости:
 ,
где
,
где
S – площадь поршня.
По каталогу определяют ближайший типоразмер гидро или пневмоцилиндра.