

§ Приводы подач с высокомоментными двигателями
В настоящее время нашли применение:
1. Теристорный привод с низкоскоростным высокомоментным двигателем постоянного тока и возбуждением от высокоэнергитичных магнитов.
Применение для возбуждения высокоэнергетичных керамических магнитов, выдерживающих 10…15 кратные пиковые моменты без размагничивания, позволяет повышать перегрузочную способность двигателя. Значительная масса и теплоемкость ротора позволяет выдерживать эти перегрузки длительное время. Трехкратный момент от номинального эти двигатели могут выдержать в течение 30 минут.
Т.к. двигатель имеет сравнительно низкие обороты, во многих случаях отпадает необходимость редуктора.
2. Электрический привод с высокомоментным двигателем постоянного тока.
Пример марки: ЭТЗС16.
Электропривод теристорный, С – следящий.
Применяются высокомоментные двигатели постоянного тока ПБВ-100, ПБВ-132 и т.д. с теристорным управлением с возбуждением от постоянных магнитов. Эти магниты выполнены на основе гексагональных ферритов.
Двигатель изготовляют со встроенным тахогенератором. В рабочем диапазоне подач двигатель имеет практически постоянный момент. Размагничивание наступает при токе большем 10-кратного значения от номинала.
Приводы подач с высокомоментными двигателями позволяют выполнять разгон перемещаемого органа до max скорости за весьма малое время (разгон до V = 10 м/мин. происходит за ≈ 0,25 сек.).
§ Привода микроперемещений
Применяют в станках предназначенных для финишной обработки точных деталей.
Наибольшее распространение получил электромеханический привод, например, с шаговым двигателем и передачей винт-гайка качения.
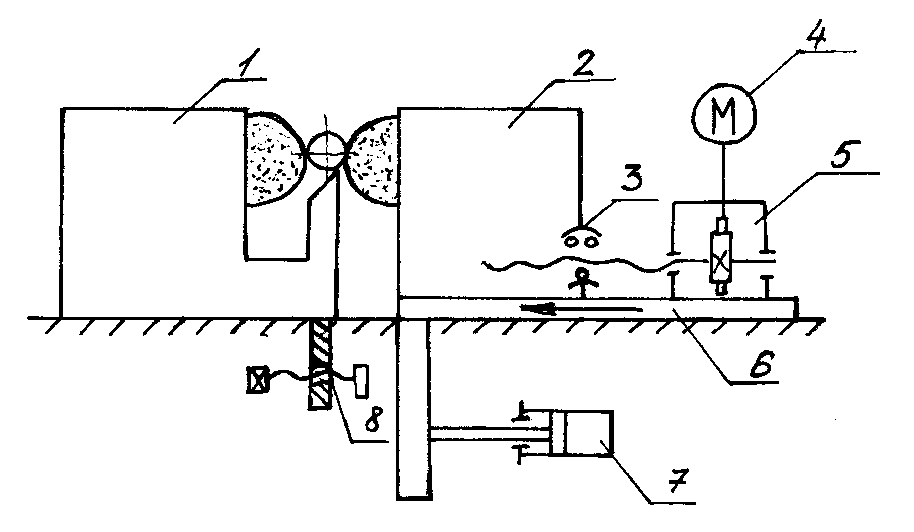
Быстрый подвод каретки 6 шлифовального круга бесцентрового круглошлифовального станка осуществляется гидроцилиндром 7 до упора 8. Рабочая подача бабки 2 производится от шагового двигателя 4 через редуктор 5 и шарико-винтовую передачу.
3. При износе шлифовального круга идет команда шаговому двигателю на подналадку. Величина подналадки обычно 0,3÷0,5 мкм.
§§ Несущая система станков. § Назначение несущей системы, основные проектные критерии
Несущая система служит для создания требуемого пространственного размещения узлов, несущих инструмент или деталь и обеспечивает точность их взаимоного расположения под нагрузкой.
К несущей системе относят: станины, основания, колонны, стойки, поперечины, ползуны, траверсы, столы, каретки, суппорты, планшайбы, корпуса шпиндельных бабок и т.п.
Несущая система должна обеспечивать:
высокую жесткость.
высокие демфирующие свойства, т.е. способность гасить колебания между инструментом и заготовкой от действия различных источников вибраций.
долговечность, выражающуюся в стабильности формы деталей, из которых состоит система.
малые температурные деформации.
§ Материалы и конструктивные формы несущей системы
1. СТАНИНЫ.
Несут на себе подвижные и неподвижные узлы станка. В зависимости от расположения оси станка делятся на горизонтальные и вертикальные.

Сечения горизонтальных станин.
Расчетная схема станины токарного станка.
Рассчитывается прогиб f в середине пролета двухопорной балки.
 ,
где
,
где
Р – поперечная сила в середине пролета;
(ЕJ)пр – приведенная жесткость балки на изгиб.

Расчетная схема сверлильного станка.
Прогиб
свободного конца балки с заделанным
концом:
