

10.3. Режим работа
После выполнения операций конфигурации, регулятор переводят в режим РАБОТА (см. главу 6) нажимая клавишу [ ]. Этот переход также осуществляется автоматически по истечении около 2-х минут, даже если параметры не были модифицированы и не нажималась ни одна клавиша, прибор перейдет в режим РАБОТА. В режиме РАБОТА происходит измерение и обработка входных сигналов по заданной программе, а также формирование выходного управляющего воздействия.
Для восстановления параметров настройки предприятия изготовителя (установка значений по-
умолчанию) необходимо:
● отключить питание регулятора,
● нажать клавишу [©],
● удерживая нажатой клавишу [©] включить питание,
● отпустить клавишу [©].
 После
проведения
данной
операции
необходимо
произвести
сохранение
параметров
по-умолчанию
в
энергонезависимой
памяти
(см.
раздел
6.5.5).
После
проведения
данной
операции
необходимо
произвести
сохранение
параметров
по-умолчанию
в
энергонезависимой
памяти
(см.
раздел
6.5.5).
Внимание! Необходимо помнить, что данная функция не имеет обратного действия.
http://www.microl.ua ● МИК-25 ver. 25.31 ● ПРМК.421457.105 РЭ изм. 1.18, 14.02.2008
43
10.4 Передаточная функция пид-регулятора мик-25
Регулятор МИК-25 построен таким образом, что в процессе работы в каждый момент времени t на выходе регулятора будет формироваться воздействие Y(t) в зависимости от входного сигнала регулятора E(t) – рассогласование между входным параметром PV и заданием регулятора SP.
Зависимость между входным сигналом регулятора E(t) и выходным Y(t) определяет передаточная функция регулятора. Алгоритм преобразования регулятора содержит три составляющие регулятора:
пропорциональная (П-составляющая), интегральная (И-составляющая) и дифференциальная (Д-
составляющая).
В зависимости от условного размещения этих составляющих внутри регулятора будет определяться его структура ([10.19]=0000 – параллельная, [10.19]=0001 – смешанная) и передаточная функция.
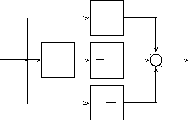
Алгоритмические схемы ПИД-регулятора МИК-25 в случае параллельной и смешанной структуры
показаны на рисунке 10.4.1.
Kp
E(t)
1 t
T
 і
0
і
0
+ + Y(t)
+
T d
d dt
а)
Kp
E(t)
1 t
T
 і
0
і
0
+ + Y(t)
+
T d
d dt
б)
Рисунок 10.4.1. Структуры регуляторов МИК-25:
а – параллельная структура,
б – смешанная структура.
Согласно рисунка 10.4.1 для параллельной структуры регулятора передаточная функция имеет вид:
Y
(t
)
=
Kp
⋅
E
(t
)
+
1 t
∫
E
(t
)dt
+
Td
dE (t )
,
Tі 0 dt
для смешанной структуры регулятора передаточная функция имеет вид:
Y
(t
)
=
Kp
⋅
E
(t
)
+
Kp t
∫
E
(t
)dt
+
Td
dE (t )
,

 Tі
0 dt
Tі
0 dt
где Кр – коэффициент пропорциональности регулятора (параметр меню конфигурации [1.00]), Ті – время интегрирования регулятора (параметр меню конфигурации [1.01]), ТД – время дифференцирования регулятора (параметр меню конфигурации [1.02]).
То есть при использовании смешанной структуры регулятора в сравнении с параллельной Ті
уменьшается в Кр раз.
http://www.microl.ua ● МИК-25 ver. 25.31 ● ПРМК.421457.105 РЭ изм. 1.18, 14.02.2008

 44
44