

Змістовий модуль 6. Розпізнавання в просторі ознак
Як уже зазначалося, для дискримінантного розпізнавання, або для розпізнавання в просторі ознак, характерним є те, що кожний об’єкт зображається окремою точкою в деякому просторі. Координатними осями цього простору виступають ознаки, за якими здійснюється розпізнавання. Таким чином, в якості координат об’єктів виступають значення відповідних ознак. Далі, розпізнавання здійснюється на основі аналізу мір близькості між об’єктами.
Приведені приклади дають можливість скласти уявлення про задачу розпізнавання в наступній інтерпретації. Є в наявності деяка сукупність об’єктів чи явищ. У відповідності з обраним принципом класифікації вона поділена на низку класів, тобто складено алфавіт класів.
В даному випадку «модельним описом» об’єкта є його вектор ознак, і тому формування модельного опису об’єкта є не що інше, як виділення ознак, отримання числових значень ознак.
Вибрано алфавіт ознак, на мові якого описується кожен клас об’єктів. Створено технічні засоби, що забезпечують вимірювання параметрів об’єктів, їх попередню обробку, виділення ознак і формування еталонних описів класів в пам'яті обчислювальної системи. На обчислювальній системі також реалізовано алгоритм розпізнавання, який дозволяє порівнювати отриманий ознаковий опис невідомого об’єкта (апостеріорну інформацію) з еталонними описами всіх класів літаків (апріорною інформацією) і на основі порівняння визначити, до якого класу він може бути віднесений. Коли з’являється об’єкт, що підлягає розпізнаванню, технічні засоби спостереження здійснюють вимірювання і визначають його ознаки. Ознаковий опис надходить на вхід алгоритма розпізнавання, який порівнює його з еталонами і приймає рішення про його класифікацію. Таким чином, узагальнена схема системи розпізнавання має вигляд, зображений на рис. 12.
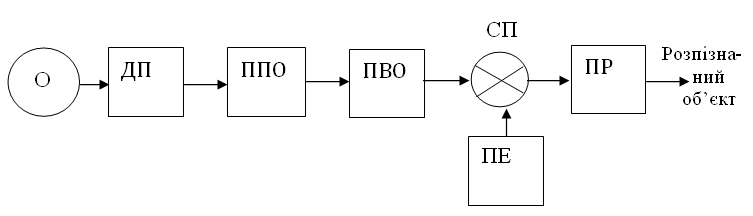
Рис. 12. – Узагальнена структурна схема системи розпізнавання образів: 0 – об’єкт; ДП – детектор параметрів об’єкта; ППО – пристрій попередньої обробки параметрів об’єкта; ПВО – пристрій виділення ознак; СП – схема порівняння; ПЕ – пам’ять еталонів; ПР – схема прийняття рішень на розпізнавання.
Виділення ознак це не вибір інформативних ознак, за якими слід здійснювати класифікацію. Такий вибір повинен здійснюватися на етапі навчання; на етапі розпізнавання просто визначаються конкретні значення ознак для всіх об’єктів, що розпізнаються.
Легко зрозуміти, що всі ці етапи тісно пов’язані між собою. Уже з цього прикладу видно, що ідеальний класифікатор не потребує виділення ознак, і навпаки, при ідеальному виділенні ознак робота класифікатору максимально спрощується. Основну проблему можна сформулювати таким чином: реальні методи отримання первинної інформації та доступні алгоритми виділення ознак часто не дозволяють отримати саме ті ознаки, які насправді відрізняють представників одного класу від представників іншого.
Існує багато дискримінантних методів розпізнавання. Тут ми обмежимося розглядом лише найпростіших детерміністських методів.
Виділяють різні типи ознак: дихотомічні (ознака може бути присутня або відсутня; наприклад - є 4 колеса або 2 колеса); номінальні (наприклад, колір: червоний, синій, зелений і т.п.); порядкові (наприклад, "великий" - "середній" - "маленький"); кількісні. Для кожного типу ознак можна вводити свої міри відстані між об’єктами.
Існують спеціальні методики, які дозволяють здійснювати перехід від некількісних типів ознак до кількісних.
У більшості методів розпізнавання робиться природне припущення, що зображення об'єктів одного класу (образу) ближчі один одному, чим зображення різних класів. Метричні методи засновані на кількісній оцінці цієї близькості. Як зображення об'єкту приймається точка в просторі ознак, мірою близькості вважається відстань між точками.
Метричним простором називається множину об'єктів над якими визначена метрика.
Метрика – правило, за допомогою якого вводиться відстань d(а,b) між елементами простору і що задовольняє умовам:
1)
d(а,b)![]() 0;
0;
2) d(а,b)=d(b,a), причому d(а,b)=0 тоді і тільки тоді, коли a=b;
3)
d(а,b)![]() d(а,с)
+ d(c,b).
d(а,с)
+ d(c,b).