

7.3.3. Пересечение поверхности вращения с плоскостью
общего положения
При пересечении поверхности вращения с плоскостью общего положения ни одна из проекций линии пересечения не вырождается в прямую линию. Задача может быть решена с помощью общего способа: введение вспомогательных секущих плоскостей. Решение упрощается, если применить способ замены плоскостей проекций. Замену нужно произвести так, чтобы заданную плоскость общего положения в новой системе преобразовать в плоскость частного положения и решать задачу пересечения поверхности вращения с проецирующей плоскостью.
Задача: Построить линию пересечения цилиндра, поверхность Ф, с плоскостью общего положения Р заданной прямыми линиями АВ и ВС (рис.7.10).
Решение:
Плоскость РАВ ВС– общего положения, а поверхность цилиндра Ф – горизонтально проецирующая, т.к. ось цилиндра перпендикулярна плоскости Н. В этом случае горизонтальная проекция искомой линии пересечения bН совпадает с горизонтальной проекцией цилиндра ФН. Для построения фронтальной проекции линии пересечения удобно выполнить следующую замену плоскостей проекций:
РАВ ВСV1; проекции искомой линии пересечения на плоскости V1 совпадает со следом плоскости Р – 1V1…2V1.
Для фронтальной проекции линии пересечения необходимо построить характерные точки:
1 и 2 – высшая и низшая точки;
5 и 6 – точки видимости;
и ряд произвольных точек 3, 4, 7, 8.
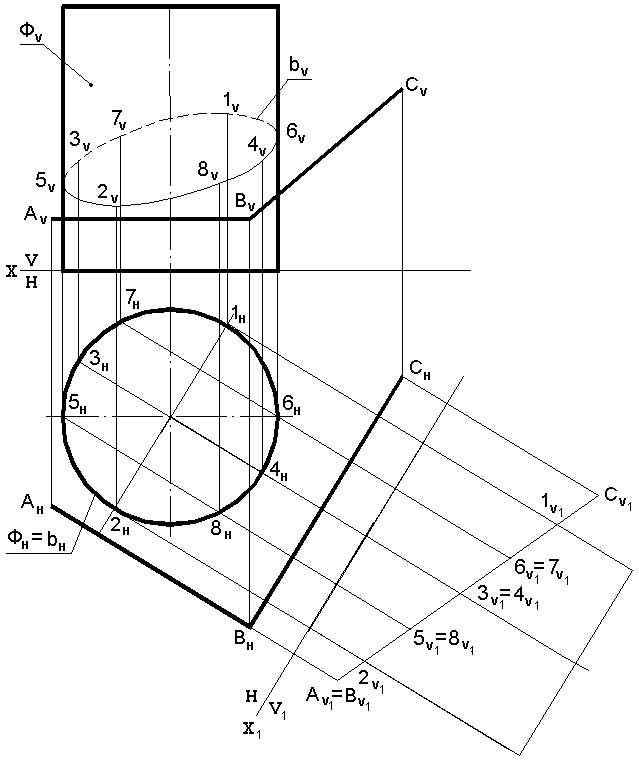
Рис.7.10. Линия пересечения цилиндра с плоскостью общего
Положения заданной прямыми линиями ав и вс
Для построения фронтальных проекций точек линии пересечения осуществляют обратную замену V1 V, при этом сохраняется высота всех точек, т. е. =1.
Для построения фронтальной проекции любой точки, например, точки 1, необходимо использовать условие =1.
Полученные точки линии пересечения соединяют плавной кривой с учетом видимости. Видима та часть линии пересечения, которая расположена в передней половине поверхности цилиндра, т.е. линия 5V,2V,8V,4V,6V, другая часть линии пересечения невидима.
7.4. Пересечение поверхности вращения с прямой линией
Прямая линия и поверхность вращения пересекаются в двух точках. Частным случаем пересечения может быть касание прямой и поверхности.
Для построения точек пересечения прямой линии с любой поверхностью необходимо:
Через заданную прямую провести вспомогательную секущую плоскость Q.
Построить линию b пересечения вспомогательной плоскости Q с заданной поверхностью Ф.
В пересечении линии b и заданной прямой определить искомые точки (обе эти линии b и а лежат в одной плоскости Q, проведенной в качестве вспомогательной через прямую а).
Определить видимость прямой.
Вспомогательную плоскость следует выбирать так, чтобы при пересечении поверхности этой плоскостью получались простые линии – окружности, прямые.
Чаще в качестве вспомогательных выбирают проецирующие плоскости, но иногда приходится применять и плоскости общего положения, пересекающие поверхность по простым линиям.
Задача: Построить точки пересечения поверхности вращения Ф с прямой АВ (рис.7.11).
Решение:
Задача решается по общей схеме:
Через прямую (АВ) проводится вспомогательная фронтально проецирующая плоскость РV.
Находится линия пересечения вспомогательной плоскости Р с поверхностью Ф – кривая второго порядка b.
Построение линии пересечения смотри в разделе 7.3.
Определяются горизонтальные проекции точек ЕH и FH пересечения линии (АВ) и поверхности Ф.
По линиям связи находятся точки ЕV и FV на проекции AVBV.
Видимость прямой АВ определяется по отношению к поверхности вращения Ф. Часть АВ, заключенная внутри поверхности вращения (между точками Е и F), не видна на обеих плоскостях проекций. На горизонтальной плоскости проекций точки Е и F видимы, т. к. они находятся над экватором поверхности вращения Ф. На фронтальной плоскости проекций точка Е видима, а F невидима, т.к. Е находится перед главным меридианом поверхности вращения Ф, а F за ним. По видимости точек Е и F определяется видимость АВ.
Задача: Построить точки пересечения цилиндра вращения Ф с прямой АВ (рис.7.12).
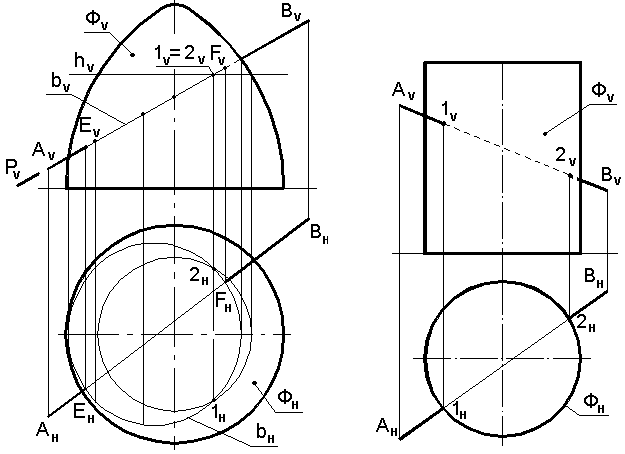
Рис. 7.11. Пересечение Рис. 7.12. Пересечение
поверхности вращения цилиндра вращения Ф
Ф с прямой АВ с прямой АВ
Решение:
Решение упрощается, т.к. поверхность цилиндра Ф – горизонтально проецирующая (ось цилиндра перпендикулярна к плоскости Н) и горизонтальная проекция цилиндра – окружность ФН. Следовательно, на горизонтальной плоскости проекций искомые точки определяют непосредственно по линиям связи.
Видимость прямой определяют по отношению к поверхности вращения Ф.
Задача: Построить точки пересечения конуса с прямой АВ (рис.7.13).
Решение:
Через прямую АВ проводится вспомогательная PV фронтально-проецирующая плоскость перпендикулярная плоскости V.
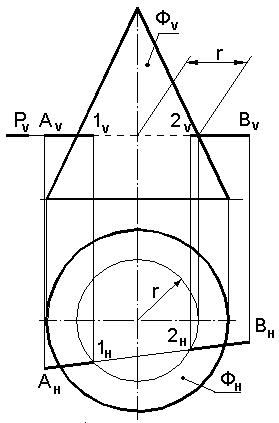
Рис. 7.13. Пересечения конуса с прямой АВ
Находится линия пересечения вспомогательной плоскости с поверхностью Ф, которая представляет собой окружность радиусом r.
Определяются горизонтальные проекции точек пересечения 1H и 2H прямой АВ и поверхности Ф, как точки пересечения проекции АHВH с окружность радиусом r.
По линиям связи находятся точки 1V и 2V на проекции AVBV.
Видимость прямой АВ определяется по отношению к поверхности вращения Ф. Часть прямой АВ, заключенная внутри поверхности вращения (между точками 1 и 2), не видна на обеих плоскостях проекций. На горизонтальной плоскости проекций точки 1 и 2 видимы, т. к. они находятся над основанием поверхности вращения Ф. На фронтальной плоскости проекций точки 1 и 2 также являются видимыми, так как они располагаются перед фронтальным меридианом.
Задача: Построить, точки пересечения конуса Ф с прямой АВ общего положения (рис.7.14).
Решение:
Для решения задачи в качестве вспомогательной рационально применить плоскость общего положения Р, проходящую через прямую АВ и вершину конуса S. Плоскость зададим двумя пересекающимися прямыми АВ и S1. Точка 1 берется произвольно на прямой АВ.
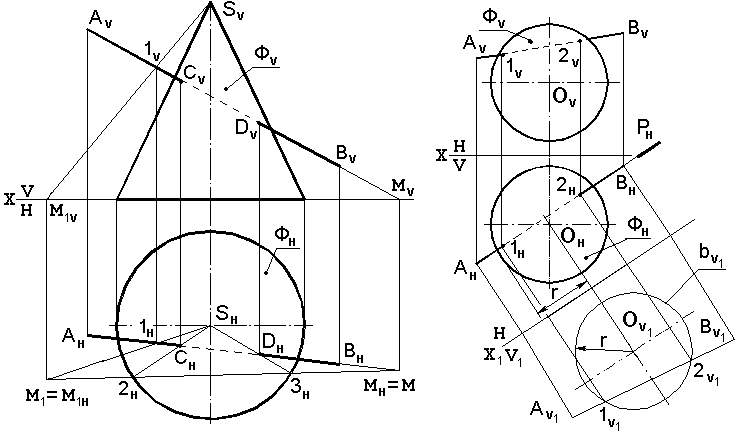
Рис.7.14. Пересечение конуса Рис.7.15. Пересечение сферы
с прямой АВ общего положения с прямой АВ общего положения
Плоскость, проходящая через вершину конуса, пересечет его по двум образующим (см. п.7.3.2, пл. Р). Эти образующие пересекут основание конуса в точках 2 и 3 (рис.7.14).
Для определения точек 2 и 3 (рис.7.14) строят линию пересечения вспомогательной плоскости Р с горизонтальной плоскостью Н, в которой лежит основание конуса. Это горизонтальный след плоскости Р – ММ1 (построение ММ1 смотри в подразделе 2.5).
2НSН3Н – горизонтальная проекция линии пересечения конуса вращения Ф и вспомогательной плоскости Р.
СН и DН – горизонтальные проекции точек пересечения прямой АВ и конуса Ф.
Видимость прямой определяют по отношению к поверхности вращения Ф.
Задача: Определить точки пересечения сферы Ф(i,l) и прямой АВ общего положения (рис.7.15).
Решение:
В качестве вспомогательной можно применить горизонтально-проецирующую или фронтально-проецирующую плоскости, проведенные через прямую АВ. Обе эти плоскости пересекают сферу по окружностям, которые проецируются на плоскости проекций в виде эллипсов.
Чтобы получить неискаженную проекцию линии пересечения (окружность), выполняется замена плоскостей проекций, т.е. вводится новая плоскость проекций V1, которая располагается перпендикулярно плоскости Н и параллельно линии АHВH. На новой плоскости проекций V1 строится линия пересечения сферы с плоскостью Р, представляющая собой окружность bV1 радиусом r, и проекция прямой АV1ВV1. Точки пересечения 1V1 и 2V1 прямой АV1ВV1 с окружностью bV1 являются искомыми точками пересечения прямой АВ со сферой. Определение проекций точек 1 и 2 на плоскостях Н и V осуществляется по линиям связи до пересечения с соответствующими проекциями линии АВ.
Видимость прямой АВ определяют по расположению ее относительно сферы.