

7 Индуктивные преобрпазователи: их конструкция и схемы включения
7.1 Принцип действия и конструкция
Индуктивный преобразователь представляет собой катушку индуктивности (дроссель), полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. Имеются, две группы преобразователей: с изменяющейся индуктивностью и с изменяющимся активным сопротивлением. Пример схемы преобразователя первой группы показан на рис. 1, а. Преобразователь состоит из П-образного магнитопровода 1, на котором размещена катушка 2, и подвижного якоря 3. При перемещении якоря изменяется длина воздушного зазора и, следовательно, магнитное сопротивление, что вызывает изменение индуктивности дросселя. Другая широко используемая модификация (плунжерный преобразователь) показана на рис. 1, б. Преобразователь представляет собой катушку 1, из которой может выдвигаться ферромагнитный сердечник 2 (плунжер). При среднем положении плунжера индуктивность максимальна.
Схема преобразователя второй группы приведена на рис. 1, е. В зазор магнитной цепи 1 вводится пластинка 2 с высокой электропроводностью, в которой наводятся вихревые токи, приводящие к увеличению потерь активной мощности катушки 3. Это эквивалентно увеличению ее активного сопротивления.
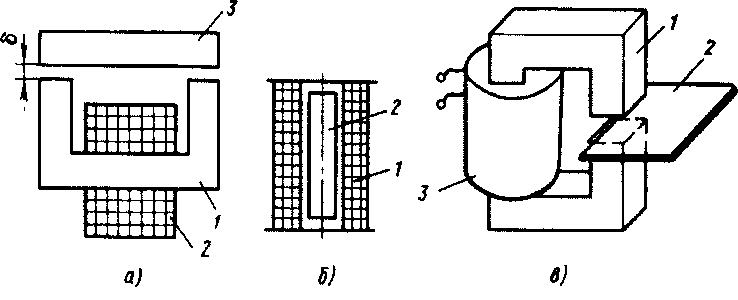
Рис. 1 Схемы индуктивных преобразователей
Индуктивный преобразователь является электромагнитом, его сила притяжения, возрастающая с увеличением чувствительности, нелинейно зависит от перемещения якоря и может явиться причиной погрешности преобразователя, предшествующего индуктивному.
На рис. 2 схематически показаны различные типы индуктивных преобразователей.
Индуктивный преобразователь (рис. 2, а) с переменной длиной воздушного зазора б характеризуется нелинейной зависимостью L =f(S).
Такой преобразователь обычно применяется при перемещениях якоря на расстояние 0,01—5 мм. Значительно меньшей чувствительностью, но линейной зависимостью L=f(b) отличаются преобразователи с переменным сечением воздушного зазора (рис. 2, б). Эти преобразователи используются при перемещениях якоря до 10—15 мм.
Описанные одинарные индуктивные преобразователи имеют ряд недостатков: их функции преобразования нелинейны; аддитивные погрешности, в частности погрешность реального преобразователя, вызванная температурным изменением активного сопротивления обмотки, велики; сила притяжения якоря значительна.
Этих недостатков лишены дифференциальные преобразователи (рис. 2, в), в которых под воздействием измеряемой величины одновременно и притом с разными знаками изменяются два зазора двух электромагнитов. Дифференциальные преобразователи в сочетании с соответствующей схемой (обычно мостовой) имеют более высокую чувствительность, чем обычные преобразователи, дают возможность уменьшить нелинейность функции преобразования, испытывают меньшее влияние внешних факторов. В этих преобразователях результирующее усилие на якорь со стороны электромагнитов меньше, чем в недифференциальных.
Применяются также индуктивные дифференциальные преобразователи трансформаторного типа (рис. 2, г), в которых две секции первичной обмотки включены согласно, а две секции вторичной обмотки — встречно. При питании первичной обмотки переменным током и при симметричном положении якоря относительно электромагнитов э. д. с. на выходных зажимах равна нулю. При перемещении якоря возникает сигнал на выходных зажимах.

Рис.2. Индуктивные преобразователи с изменяющейся длине запора (в), с изменяющимся сечением зазора (0), дифференциальный (в), дифференциальный трансформаторный (г), дифференциальный трансформаторный с разомкнутой магнитной цепью {&) и магннтоупругий (е)
Для преобразования сравнительно больших перемещений (до 50—100 мм) применяются индуктивные преобразователи с незамкнутой магнитной цепью. На рис. 2, ё) схематически показано устройство дифференциального трансформаторного индуктивного преобразователя с незамкнутой магнитной цепью, используемого для передачи показаний различных неэлектрических приборов (манометров, дифференциальных манометров).
Если ферромагнитный сердечник преобразователя подвергать механическому воздействию F, то вследствие изменения магнитной проницаемости материала сердечника /л изменится магнитное сопротивление цепи, что повлечет за собой изменение индуктивности L и взаимной индуктивности М обмоток. На этом принципе основаны магнитоупругие преобразователи (рис. 2,е).
Конструкция преобразователя определяется главным образом значением измеряемого перемещения. Габариты преобразователя выбирают, исходя из необходимой мощности выходного сигнала и других технических требований.