

Тема 7. §7.1 Фільтрація та детектування цифрових сигналів
Погіршення співвідношення «сигнал- шум» накладає додаткові вимоги на виділення інформації з одержаних сигналів при використанні певних методів їх обробки. На протязі одного тактового інтервалу передачі цифрового сигналу бінарна низькочастотна система передає один з можливих інформаційних сигналів g1(t) або g2(t). В М- арних системах кількість сигналів, що комутуються узгоджена з розмірністю системи. Відповідно бінарна смугова система передає також два сигнали, які позначають S1(t) та S2(t). Оскільки загальне трактування демодуляції та детектування для низькочастотних і смугових систем співпадають за своєю суттю, то в загальному випадку можна говорити про детектування в бінарних системах. Тому записується, що інформаційний сигнал Si може приймати значення:
 ,
де Т- тривалість тактового імпульсу.
,
де Т- тривалість тактового імпульсу.
Одержаний
сигнал на приймальній стороні, внаслідок
спотворення та неідеальності імпульсних
характеристик, прийме значення
![]() ,
деn(t)
є дією шумів,hc(t)-
імпульсна характеристика приймального
тракту, * - реалізація функції згортки.
,
деn(t)
є дією шумів,hc(t)-
імпульсна характеристика приймального
тракту, * - реалізація функції згортки.
Для
бінарної системи згортка сигналу з
імпульсною характеристикою не погіршує
якості сигналу. Тому сигнал приймає
значення
![]() .
.
Під термінами демодуляція та детектування часто розуміють значення- синоніми. Точніше їх визначення передбачає, що демодуляцію визначають як відновлення з сигналу неспотвореного відеоімпульсу, а під детектуванням розуміють процес прийняття логічного рішення про наявність нуля чи одиниці в даний момент в одержаному цифровому потоці. Останнє відповідає пороговому формуванню одержаних сигналів. Тому процеси демодуляції і детектування можна трактувати як два етапи відновлення цифрової інформаційної послідовності в цифр К3. Це можна відобразити наступною функціональною схемою.
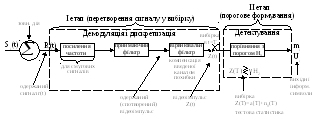
При обробці смугових сигналів на першому етапі використовується вузол з перетворенням частоти, який забезпечує перенесення прийнятого інформаційного сигналу в смугу частот, придатну для подальшої обробки. У вузлі демодуляції і дискретизації обов’язковим є приймальний фільтр, який забезпечує виділення з одержаного сигналу r(t) інформаційного відеоімпульсу. Однак додаткова фільтрація, що проводиться на передаючій стороні може приводити до міжсимвольної інтерференції та інших спотворень вихідних імпульсів. Тому після приймаючого фільтру додатково застосовують оптимізований варіант узгодженого або кореляційного фільтру, який ще називають вирівнюючим або еквалайзером. Цей вузол не є обов’язковим, якщо в передаючій частині не застосовується додаткова фільтрація сигналів.
Завершаючим етапом є вибірка значень амплітуди відновленого відфільтрованого відеосигналу в момент часу t=T. Одержані вибірки Z(T) на другому етапі обробки піддаються пороговому формуванню. Якщо вважати, що шум, який вноситься в сигнал ЛЗ, описується гаусовим розподілом, то на виході фільтра сигнал Z(T)= ai(T)+ n0(T), де аі- інформаційний компонента, n0- шумова компонента.
Густина
ймовірності випадкового гаусового шуму
може бути описана як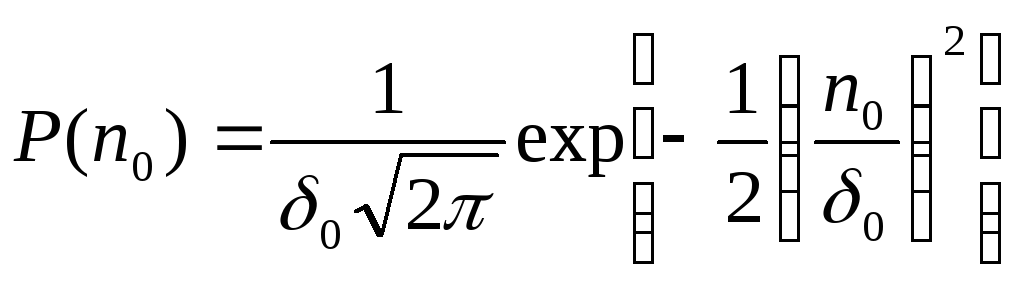 ,
деδ0
– дисперсія шуму. Таким чином можна
записати густину умовних ймовірностей
для складових S1
та S2:
,
деδ0
– дисперсія шуму. Таким чином можна
записати густину умовних ймовірностей
для складових S1
та S2:
![]()

Вона показує густину ймовірності випадкової змінної S(t) при передачі символу S.
Аналогічно P(Z|S2) стосується передачі символу S2.
П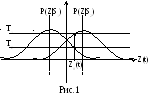 ісля
того як прийнято сигнал і перетворено
його в числову вибірку, дійсна форма
сигналу вже не має значення, оскільки
ми маємо значенняZ(T),
необхідне для детектування сигналу.
Важливим параметром при цьому є енергія
cигналу,
а не його форма. Чим більша енергія
сигналу, а для цього має бути більша
амплітуда, тим вища ймовірність його
правильного детектування.
ісля
того як прийнято сигнал і перетворено
його в числову вибірку, дійсна форма
сигналу вже не має значення, оскільки
ми маємо значенняZ(T),
необхідне для детектування сигналу.
Важливим параметром при цьому є енергія
cигналу,
а не його форма. Чим більша енергія
сигналу, а для цього має бути більша
амплітуда, тим вища ймовірність його
правильного детектування.  Процес
детектування визначається вибраними
пороговими значеннями, що можна описати
умовою
Процес
детектування визначається вибраними
пороговими значеннями, що можна описати
умовою![]()
![]() .
.
Як видно з графічної залежності ймовірнісного розподілу сигналів S1 та S2, відтворене значення Z(T) залежить від вибору порогів і1 та і2. Н1 та Н2 називають відповідно гіпотезами, при яких Z(T) більше або менше за параметр детектування γ.