

5. Правила побудови програми.
Основні правила побудови програми можна сформулювати так.
1. Загальна задача управління розбивається на окремі програми, які можуть виконуватись індивідуально і паралельно. Кожна програма розбивається на етапи, а етапи-на кроки. Розбиття програми на етапи 1 кроки переважно відображає розета* технологічного процесу на окремі операції.
2. Програма як мінімум складається з одного алгоритму ЕТП й алгоритму ОКЛ. Перші входи кожного етапу (Не)повинні безпосередньо (без проміжних алгоблоків) з'єднуватися з входами алгоритму ОКЛ (починаючи з тринадцятого 1 далі), які задають номера відповідних етапів, див. рис.10.1,а.
3. Номер алгоблока, в який поміщено алгоритм ОКЛ, визначав номер програми, яка обслуговується етапами, зв'язаними з даним алгоритмом ОКЛ. Алгоритми ОКЛ можуть бути розміщені лише в перших чотирьох (00, 01,02,03) алгоблоках, в іншому випадку ці алгоритми просто не будуть обслуговуватись. Якщо в контролері реалізовано менш як чотири контури, алгоблоки, які залишилися вільними в межах першої четвірки, можуть займатися будь-якими іншими алгоблоками.
4. У логічній моделі порядок обслуговування алгоблоків відповідає порядковому номеру алгоблоків. Однак у межах виконання конкретної програми, в кожному циклі роботи контролера, то активним у програмі є тільки один етап, а в етапі лише один крок.Таким чином, загальний час виконання однієї програми не може бути менший, як nш*То, де пш-сумарне число кроків даної програми.
5 . Для
того, щоб програма виконувалась циклічно,
досить в одному з кроків запрограмувати
умовний або безумовний перехід до
раніше виконуваному етапу.
. Для
того, щоб програма виконувалась циклічно,
досить в одному з кроків запрограмувати
умовний або безумовний перехід до
раніше виконуваному етапу.
Рис. 10.1,а
Умовою виконання умовного переходу в сигнал С=1 на третьому кроці третього етапу див. рис. 10.1,б.
6. Для синхронізації роботи різних програм можна використовувати команди пуску, зупину і скиду алгоритму ОКЛ.
Як приклад показано схему рис.10.2, яка дозволяє синхронно запускати, зупиняти і скидати три різні програми. Оператор за допомогою клавіш лицьової панелі управляє першою програмою. Сигнали стану цієї програми, які формуються на виході алгоритму ОКЛ, управляють другою і третьою програмами.
Рис. 10.1,б
У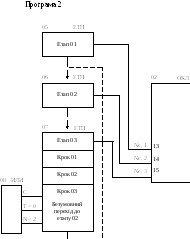 другому прикладі синхронізації 18-й крок
першого етапу першої програми запускає
третю програму, див. рис.10.3.
другому прикладі синхронізації 18-й крок
першого етапу першої програми запускає
третю програму, див. рис.10.3.
|
|

Рис.10.2
7. Для контролю стану дискретних сигналів на індикатори контролю, розміщені на лицьовій панелі логічної моделі (32 лампових індикатори) необхідно задіяти алгоритм дискретного контролю ДИК. Кожний ламповий індикатор відображав стан сигналу на відповідному за номером вході алгоритму ДИК.
|
|

Рис.10.3
8. 3 метою підвищення оперативності контролю за ходом виконання програми управління в логічній моделі передбачено процедуру формування сигналізації про помилки в ході виконання програми з індикацією на лицьовій панелі індикатора відповідного номеру програми(всього 4 індикатори).
Помилка програми формується за допомогою алгоритмів порогового контролю ПОК 1(або) логічного контролю ЛОК.
Приклад.
Розглянемо приклад виконання програми для об’єкта зображеного на рисунку 10.4, і який має такий алгоритм функціонування:
При натисненій кнопці "Пуск" відчиняється клапан ДВОІ і продукт наповнює апарат. При досягненні заданого рівня спрацьовує датчик ВДОІ, за командою якого зачиняється клапан ДВОІ і відчиняється клапан подачі пари ДВ02. Починається підігрів продукту. При досягненні заданої температури (наприклад, 70% діапазону вимірювання) за сигналом датчика ВАОІ подача пари повинна припинитися. Потім продукт витримується в апараті 10 хв, після чого відчиняється клапан ДВОЗ і апарат спорожнюється. Коли апарат спорожнявся, тобто за сигналом датчика ВД02, цикл повторюється автоматично.
Складаючи програму, умовно розіб’емо технологічний цикл на чотири етапи: наповнення, підігрів, витримка й опорожнення.
Як видно з алгоритмічної структури програми, наведеної нижче, див. рис.10.5, цим технологічним операціям відповідають і етапи програми.
Перший етап формує логіку включення клапана подачі продукту ДВОІ.
|
|

Рис.10.4
Перший крок етапу контролює сигнал на виході елемента ИЛИ, вхід якого подаються сигнали з дискретних входів контролера 01 і 03 (групи Б), до якого підключені відповідно кнопка "Пуск" і дискретний вихід нижнього сигналізатора рівня ВД02. Якщо один з цих сигналів стане рівним "1", тоді на виході алгоблоку ИЛИ сигнал стане рівним "1". Цей сигнал підключено до входу "С" кроку. В кроці встановлено контрольний час Т=~. Це означає, що крок нескінченно довго чекає виконання умови С=1. Як тільки ця умова виконається, вихід кроку включить перший дискретний вихід контролера (група В), до якого підключено клапан подачі продукту в апарат, і перейде до виконання кроку 2. На другому, кроці етапу 01 формується безумовний перехід до другого етапу.
Другий етап реалізує припинення подачі продукту в апарат і підключення підігріву продукту.
Перший крок контролює сигнал на дискретному вході 02 контролера (група Б), до якого підключено дискретний вихід дискретного сигналізатора рівня ВДОІ. Цей сигнал подається на вхід "С" кроку. В кроці встановлено контрольний час Т=~. Як тільки С=1, тобто рівень продукту в апараті досягне верхнього рівня, вихід кроку через входи "вмикання" алгоблоку управління двопозиційним навантаженням УДП, вмикає другий дискретний вихід контролера (група Б), до якого підключено клапан подачі пари в апарат. Одночасно програма переходить до виконання наступного кроку.
Другий крок програми обнулює перший етап, що призводить до відключення дискретного виходу 01 контролера (група Б), тобто до перекриття подачі продукту в апарат. Програма переходить до виконання третього кроку.
На третьому кроці формується безумовний перехід до третього етапу.
Третій етап реалізує припинення подачі пари в апарат і організовує витримку часу.
Перший крок контролює сигнал на пороговому елементі, підключеному в свою чергу до 01 аналогового входу контролера (група А), на який надходить сигнал від датчика температури. Алгоритм ПОР спрацьовує, коли Х>=70% (з урахуванням гістерезису, який встановлено 1%), тобто, коли температура в апараті досягає заданого значення. У результаті вмикається вихід кроку, який через входи "Вимкнути" алгоритму УДП вимикав 02 дискретний вихід (група Б), тобто перекриває клапан подачі пари ДВ02. Програма переходить до другого кроку.
На другому кроці програми реалізована витримка часу 10 хв, по закінченню якого вихід кроку вмикав 03 дискретний вихід (група Б) контролера, до якого підключено клапан злива ВДОЗ, і переходить до виконання третього кроку.
На третьому кроці формується безумовний перехід до четвертого етапу.
Четвертий етап реалізує закінчення випорожнення апарата і переходу до нового циклу роботи.
|
Рис.10.5. |

Перший крок етапу контролює сигнал на дискретному вході 03 контролера (група Б), до якого підключено дискретний вихід нижнього сигналізатора рівня. Як тільки на вході С сигнал стане рівним 1 (рівень досягне нижнього значення), програма переходить до виконання наступного кроку.
Другий крок програми обнулює третій етап, що призводить до відключення дискретного виходу 03 (група Б), тобто до закриття клапану зливу. Програма переходить до наступного кроку.
На третьому кроці формується безумовний перехід до першого етапу, тобто до нового циклу виконання програми.
Завдання до теми 10. Вивчити і ознайомитись з принципами програмування контролера Реміконт-130 і схемами для керування технологічним об'єктом.