

Обобщение решения позиционных задач на пересечение конической поверхности с любыми прямолинейчатыми поверхностями
Из анализа и решения задачи на пере-сечение конической поверхности с поверх-ностью гиперболического параболоида вы-текает следующее обобщение на случаи пересечения поверхности конуса любой ст-руктуры с любой прямолинейчатой повер-хностью (см. рис.15.27 -15.54):
Если коническая поверхность Ф пере-секается с какой бы то ни было прямоли-нейчатой поверхностью , то линия их пересечения состоит из точек встречи образующих поверхности с поверхнос-тью Ф.
Это обобщение отражает единое со-держание технологии решения подобного рода позиционных задач, форма графи-ческой реализации которых определяется конструктивными особенностями пересека-ющихся поверхностей.
16.4.15. Пересечение двух поверхностей вращения
(рис.16.56 – 16.63)
Предварительные соображения
Поверхности вращения являются систе-мами последовательных положений линии, вращающейся вокруг прямолинейной оси.
Так как образующие линии этих поверх-ностей могут быть как прямыми, так и кри-выми, а последние – как плоскими, так и пространственными, закономерными или случайного вида, а их оси - параллельны-ми, пересекающимися или скрещивающи-мися, занимающими в пространстве как общие, так и частные положения, то потен-циально существует множество вариантов условий позиционных задач на построение линий их пересечения.
Очевидно, что решение любой из этих задач определяется применением такого вспомогательного посредника, который пе-ресекает обе поверхности по окружностям.
|
|
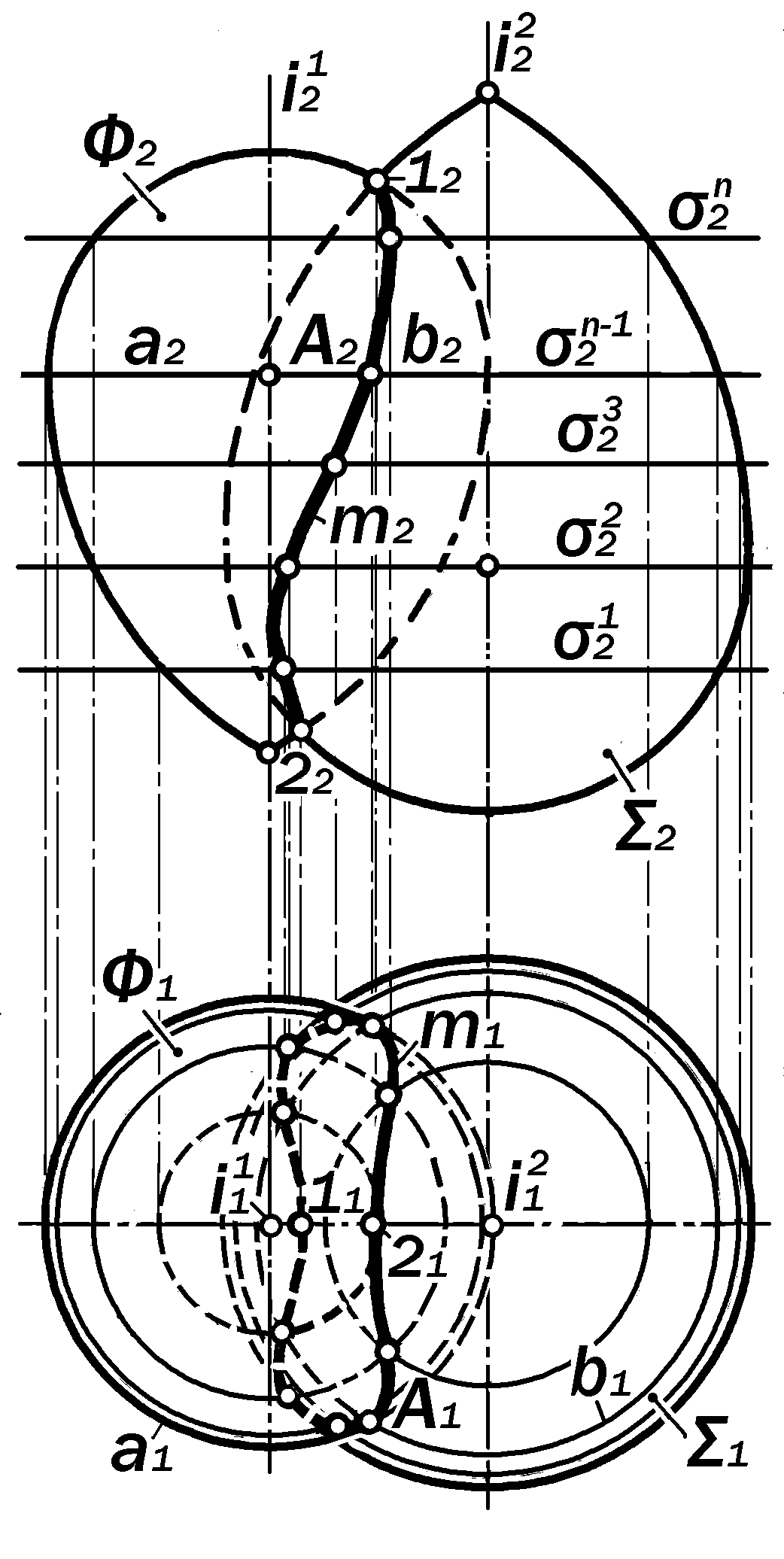
Рис.16.56. Графическое решение позиционной задачи на пересечение двух поверхностей вращения Ф и с вертикальными осями
|
|
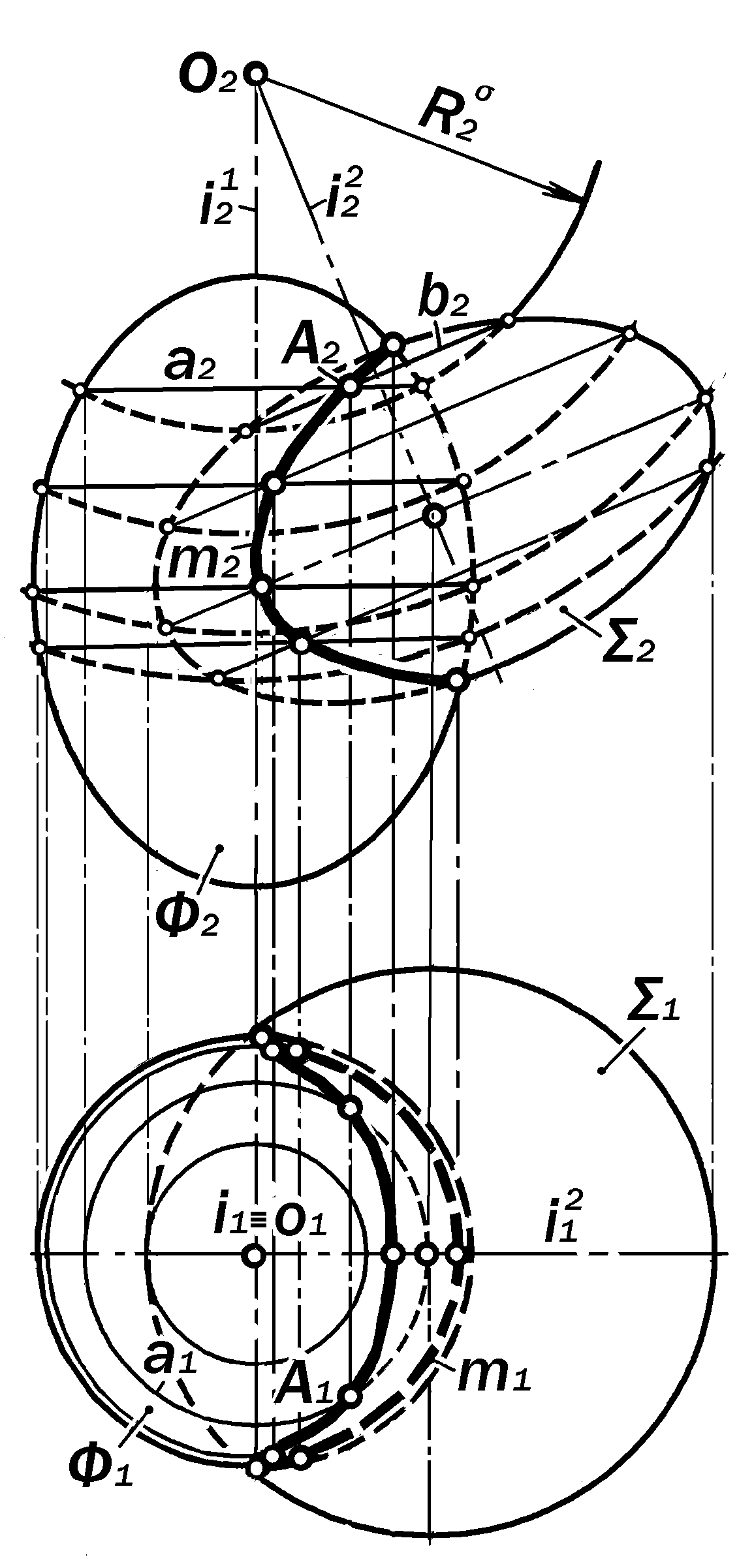
Рис.16.57. Графическое решение позиционной задачи на пересечение двух поверхностей Ф и вращения с фронтальными пересекающимися осями
Пример 16.18. Построить двухкартин-ный комплексный чертёж двух пересекаю-щихся поверхностей вращения Ф и с вертикальными осями i1 и i2 , равноудалён-ными от П2 (рис.16.56).
Решение: 1. Фронтальная плоскость уровня , задаваемая параллельными ося-ми вращения, пересекает обе поверхности по очерковым линиям их фронтальных проекций в точках 12 и 22, горизонтальные проекции 11 и 21 которых располагаются на горизонтальном следе 1 плоскости ;
2. Проекции промежуточных точек ли-нии пересечения строятся при помощи нес-кольких положений 1, 2,…, n вспомога-тельной горизонтальной секущей плоскости , пересекающей обе поверхности по окру-жностям а и b;
3. Плоскость в положениях 1 и 3 пересекает прежде Ф, а затем - по их экваторам, на горизонтальных проекциях которых проекция m1 линии m их пересе-чения теряет видимость.
4. Соединив одноименные проекции по-строенных точек с учетом их видимости, по-лучаем проекции m1 и m2 искомой линии пересечения m поверхностей Ф и .
Пример 16.19. Построить двухкартин-ный комплексный чертёж поверхностей вращения Ф и с пересекающимися осями і1 и і2, равноудалёнными от П2 ( рис.16.57).
Решение: 1. Принять фронтальную проекцию о2 точки о пересечения фронта-льных осей данных поверхностей за центр концентрических окружностей различного радиуса R2, изображающих вспомогатель-ные секущие сферы ;
2. Так как сферы соосны с каждой из заданных поверхностей, то они пересекают их соответственно по параллелям а и b, которые, в свою очередь, пересекаются в искомых точках трёх поверхностей: Ф, и . Поэтому на чертеже следует из о2 ради-усом R2 провести окружность, которая пе-ресечёт очерки данных поверхностей в то-чках, попарно определяющих фронтальные проекции а2 и b2 их параллелей, пересека-ющиеся в точках А2 В2 фронтальной про-екции m2 искомой линии пересечения m;
3. Повторить операции п.2 необходи-мое и достаточное число раз, и соединить полученные проекции точек плавной кривой искомой линией m2;
4. Горизонтальную проекцию m1 иско-мой линии m пересечения данных поверх-ностей вращения строить на основе графи-ческого моделирования отношения при-надлежности её точек к поверхности Ф, горизонтальные проекции параллелей кото-рой проецируются на П1 в окружности.
Графическое решение позиционных задач на пересечение двух поверхнос-тей вращения со скрещивающимися осями является очень громоздким. Их принципиальное решение может быть получено путем преобразования одной из заданных поверхностей аппаратом центрального подвижного проецирова-ния (см. рис.16.19) в проецирующую, собирательное свойство вырожденной проекции которой позволит построить проекции искомой линии их пересече-ния на основе моделирования отноше-ния принадлежности её точек ко вто-
рой , не преобразованной поверхности.