

§ 2.2.3. Описание связи между подсистемами разной природы
Учебные элементы параграфа:
Трансформаторная связь
Гираторная связь
В большинстве случаев ТОУ представляю собой сочетание элементов различной физической природы. Описание связей между ними осуществляется через взаимодействие источников этих подсистем. Различают три типа связей: трансформаторная, гираторная и через зависимые параметры элементов.
Трансформаторная связь- связь между источниками разного типа и фазовых переменных одинаковой природы. В одной подсистемеp, выделяется зависимый источник потенциала -Е. Потенциал этого источника, зависит от потенциала, который создается на зависимом источнике потокаІ, выделяемом в другой подсистемеq.. Трансформаторная связь бывает двух видов (рис. 2.5;2.6)
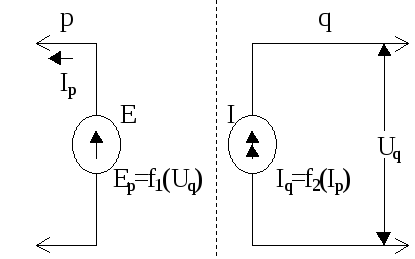
Рис. 2.5. Iвид трансформаторной связи.

Рис. 2.6. ІІ вид трансформаторной связи.
Такой тип связи характерен для электромеханических систем (реле).
Г ираторная
связь– это связь между источниками
одного типа и фазовых переменных разной
природы (рис. 2.7;2.8)
ираторная
связь– это связь между источниками
одного типа и фазовых переменных разной
природы (рис. 2.7;2.8)
.
Рис. 2.7. Iвид гираторной связи.

Рис. 2.8. ІІ вид гираторной связи.
Взаимодействие источников происходит таким образом: изменение фазовых сменных в одном из источников влияет на смену фазовых сменных в другой подсистеме, и через это связанные источники в разных системах. Такой тип связи характерен для гидромеханических систем (поршневой насос).
Связь через зависимые параметрыэлементов присуща для взаимодействия различных подсистем с тепловой системой, так как изменение температуры, как правило, приводит к изменению параметров компонентов. Так сопротивление резистора зависит от температуры.
Вопросы для самоконтроля и подготовки к МК:
Чем трансформаторная связь отличается от гираторной?
Тема 2.3. Представление математических моделей на макро уровне
§- 2.3.1. Представление в форме эквивалентных схем
Учебные элементы параграфа:
Эквивалентная схема (ЭС) модели.
Методика составления ЭС
Структуру формальной математической модели на макроуровне можно представлять на разных уровнях абстракции. Одной из них являются эквивалентные схемы, которые состоят из набора базовых элементов и связей между ними. Методика построения эквивалентных схем содержит следующие шаги:
Выделить элементы, массу которых надо учесть и изобразить их условным изображением двухполюсника. Один полюс соединить с базовым узлом, определяющим инерционную систему отсчета. Второй будет соединяться с другими элементами.
Выделить элементы трения и упругости. Один полюс элементов трения подсоединить к базовому узлу.
Соединить элементы массы с элементами трения, а элементы упругости между массами.
Выделить источники, прикладываемые к пассивным элементам. Источник силы (потока) соединяется между базовым узлом и массой, на которую он воздействует.
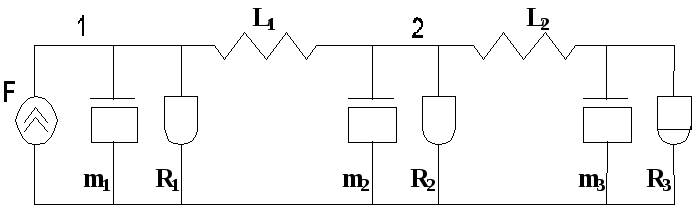
Рассмотрим пример составления эквивалентной схемы для системы, состящей из элементов одной физической природы - технической
Системы
механического типа, представленной на
рис. 2.9а. Э то
грузовик массойm1
, который тянет два прицепа с массой
m2,
m3.
то
грузовик массойm1
, который тянет два прицепа с массой
m2,
m3.
а)
б)
Рис. 2.9. Механическая поступательная система (а)
и ее эквивалентная схема (б)
Эквивалентная схема для сил и скоростей вдоль горизонтальной оси представлена на рис. 2.9.б.
Сила инерции массы автомобиля, прицепа 1 и прицепа 2, которая преодолевается силой тяги F, противостоят силы сопротивления (трение об поверхность движения) R1, R2, R3. Упругие связи между тягачом и прицепами представляются элементами L1 и L2.
Если по эквивалентной схеме составить топологические уравнения, то получится система дифференционных уравнений. Это формальная математическая модель.
Для систем, в которые входят подсистемы разнообразной природы эквивалентные схемы создаются для каждой из них с учетом вида связи.
Пример такой системы и ее эквивалентная схема представленны на рис. 2.7.
Cистема состоит из гидравлической подсистемы - трубопровод, заполненный жидкостью и механической подсистемы - цилиндр с поршнем.
Гидравлическая подсистема (p) представляется тремя пассивными элементами: C1 - емкость трубопровода; L1 – индуктивность (упругость среды); R1 – сопротивление трения по длине трубопровода; и двумя активными: Р - источник давления (потенциальный); М - источник расхода (поток).
Механическая подсистема (q) состоит из следующих базовых элементов: m1 - масса поршня; m2 - масса штока; R2 - трение поршня о стенки цилиндра; R3 - трение штока об уплотнение; UP1 - упругая связь между поршнем и штоком; F1 - (источник) сила, которая воздействует на поршень через шток. F2 -сила, воздействующая на поршень со стороны жидкости.

а)

б)
Рис. 2.10. Гидро-механическая система (а),