

5.4 Переходный процесс при изменении статической нагрузки
Исходная система уравнений и их решение те же, что и при пуске двигателя, то есть
![]() .
(5.17)
.
(5.17)
Используя (5.17), запишем формулы для расчета (t) и i(t) при набросе и сбросе нагрузки. Графики этих процессов показаны на рисунке 5.4 и 5.5 соответственно.
Наброс нагрузки: нач=С1, кон=С2, iнач=IС1, iкон=IС2.
![]() ;
;
![]() .
.
Сброс нагрузки: нач=С2, кон=С1, iнач=IС2, iкон=IС1.
![]() ;
;
![]() .
.

5.5 Переходные процессы при реверсе и торможении противовключением
Конечные и начальные значения фазовых координат х(t) для конкретных процессов при активном и реактивном характере момента сопротивления МС на валу двигателя необходимо брать из статических механических характеристик (см. рис. 5.6), а выражения для конкретных переходных процессов – по (5.14).
а) Активный МС. Процесс начинается в точке а, а заканчивается в точке с, когда М=МС.
нач=С, Мнач=-МТ;
кон=уст=-(0+С); Мкон=Муст=МС.
Величина С рассчитывается с учетом добавочного сопротивления ступени противовключения (RПВ), включаемой для ограничения тормозного тока (момента) при противовключении.
![]() ,
,
г деRЯ
– сопротивление цепи якоря с учетом
деRЯ
– сопротивление цепи якоря с учетом
пусковых ступеней.
б) Реактивный МС. Начальные и конечные значения фазовых координат в этом случае выбираются аналогично указанным в разделе 3.4, б при рассмотрении электромеханических переходных процессов.
5.6 Переходные процессы при динамическом торможении
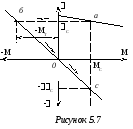
Статические механические характеристики для динамического торможения двигателя показаны на рисунке 5.7. Начальные и конечные значения фазовых координат принимаются с учетом характера момента сопротивления.
а) Активный МС. В этом случае нач=С, Мнач=-МТ,
![]() ,
Мкон=МС.
,
Мкон=МС.
Величина R для расчета кон состоит из сопротивления обмоток в цепи якоря и добавочного сопротивления, включаемого для ограничения тормозного тока (момента МТ).
![]() ;
;
![]() .
.
б) Реактивный МС. В этом случае начальные условия те же, что и при активном МС, то есть нач=С, Мнач=-МТ, кон=0, Мкон=0.
![]() ;
;
![]() .
.
5.7 Длительность механических переходных процессов при линейных механических характеристиках двигателя
Длительность механического переходного процесса (tа) можно найти из общего выражения (5.14) для условия, что при t=ta, x(t)=Xa (т.е. некоему конкретному значению фазовой координаты).
![]() .
.
Отсюда легко определить, что
![]() ;
;
![]() ;
;
![]() .
(5.18)
.
(5.18)
Например, время торможения до =0 при реверсе двигателя с потенциальным (активным) МС определяется по нач=С, кон=-(0+С). Тогда, приняв в (5.18) Ха=0, получим
![]() .
.
Время реверса при активном МС будет определяться из условия: нач=С,
кон=-(0+С); Ха=а=-(0+С). Тогда
![]() .
.
Получаемый в этом случае результат приводит к делению на ноль в знаменателе выражения (5.18) и, таким образом, к ta, что и должно быть теоретически при экспоненциальном переходном процессе.
Чтобы получить tа, а какое-либо приближенное численное значение, надо принять ХаХ’кон=0,98Хкон. в рассматриваемом примере надо принять кон -0,98(0+С) и тогда
![]() ,
,
что обеспечит конечное расчетное время механического переходного процесса.