

Понятие о математическом описании дискретных устройств
Для того чтобы задать (описать) дискретное устройство (автомат), необходимо математически описать все его элементы, т.е. определить алфавит внутренних состояний, входной и выходной алфавиты, функции переходов и выходов, а также выделить начальное состояние, в котором автомат находится в начальный момент времени.
Заметим, что для математического описания дискретного устройства без памяти (комбинационного автомата) достаточно задать множества (алфавиты) входных и выходных наборов, а также однозначное соответствие между входными и выходными наборами (функцию выходов)
![]()
Наиболее употребительными являются следующие формы задания автоматов: с помощью таблиц – табличный способ; с помощью графов – графический способ; с помощью символов – аналитический способ. Все указанные способы эквиваленты друг другу. Если ДА задан каким-либо одним способом, то не составляет труда перейти к любому другому способу.
Табличный способ.
ДА могут задаваться (описываться) таблицами различным образом. Рассмотрим самый общий случай табличного способа на примере автоматов Мили и Мура.
Обычно функции
переходов
![]() и выходов
и выходов![]() автомата Мили задаются таблицей
переходов-выходов (табл.1.1).
автомата Мили задаются таблицей
переходов-выходов (табл.1.1).
В клетку таблицы
переходов-выходов, находящуюся на
пересечении столбца с буквой aiи строки с буквойxjзаписывается в числителе состояние
автомата![]() в которое он переходит из состоянияaiпри подаче на вход сигналаxj,
а в знаменателе – выходной сигнал
в которое он переходит из состоянияaiпри подаче на вход сигналаxj,
а в знаменателе – выходной сигнал![]() который формируется при таком переходе.
который формируется при таком переходе.
|
|
|
Таблица 1.1 |
|
| ||||
|
|
|
Входной сигнал |
|
|
| |||
|
|
|
a0 |
a1 |
a2 |
a3 |
|
| |
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
Автомат, заданный табл.1.1, определен на множестве входных сигналов X= (x1,x2), множестве внутренних состоянийA= (a0,a1,a2,a3), из которыхa0– начальное состояние, и на множестве выходных сигналовZ= (z1,z2,z3).
По таблицам переходов-выходов можно найти выходную реакцию автомата на любую комбинацию входных сигналов.
Функцию переходов
и выходов автомата Мура
![]() и
и![]() можно задать отмеченной таблицей
переходов, которая строится так же, как
и таблица переходов-выходов автомата
Мили для переходов, но символу каждого
внутреннего состоянияaiставится в соответствие строго
определенное значение выходного символаzk(табл.1.2).
можно задать отмеченной таблицей
переходов, которая строится так же, как
и таблица переходов-выходов автомата
Мили для переходов, но символу каждого
внутреннего состоянияaiставится в соответствие строго
определенное значение выходного символаzk(табл.1.2).
|
|
Таблица 1.2 |
| ||||||
|
|
Выходной сигнал |
z2 |
z1 |
z2 |
z2 |
z3 |
z3 |
|
|
|
Состояния |
a0 |
a1 |
a2 |
a3 |
a4 |
a5 |
|
|
|
Вх. сигнал |
| ||||||
|
|
x1 |
a1 |
a2 |
a3 |
a4 |
a4 |
a1 |
|
|
|
x2 |
a0 |
a0 |
a0 |
a5 |
a1 |
a5 |
|

Отмеченная таблица переходов отражает то свойство автомата Мура, что выходной сигнал зависит только от состояния автомата в этот момент времени независимо от пути, по которому он пришел в это состояние.
В практике встречаются и другие виды таблиц, описывающих функционирование данного конкретного ДА (таблицы состояний, таблицы включений, кодированные таблицы переходов и т.д.), однако все они являются частными случаями рассмотренных таблиц переходов-выходов.
Графический способ.
Этот способ задания дискретных автоматов основан на использовании направленных графов.
Граф произвольного дискретного автомата представляет собой комбинацию вершин и ребер, изображаемых на рисунках кружочками и соединяющими их стрелками соответственно. Вершины отождествляются с состоянием автомата, а ребра – с входными сигналами. Если входной сигнал xiвызывает переход автомата из состоянияajв состояниеak, то на графе автомата этому сигналу соответствует обозначенная буквойxiстрелка, соединяющая вершину, соответствующую состояниюaj, с вершиной, соответствующей состояниюak.
При этом, разумеется, не исключается случай, когда вершины ajиakсовпадают.
Для задания функции
выходов автомата Мили ребра графа
(стрелки) обозначаются не только входными,
но и соответствующими им выходными
сигналами. Если, например, обозначенная
входным сигналом xiстрелка соединяет вершинуajс вершинойak,
то ей приписывается выходной сигнал![]() и она обозначается на графеxi/zm.
Это означает, что если на автомат,
находящийся в состоянииaj,
будет подан входной сигналxi,
то на выходе появится выходной сигналzmи автомат перейдет в состояниеak.
и она обозначается на графеxi/zm.
Это означает, что если на автомат,
находящийся в состоянииaj,
будет подан входной сигналxi,
то на выходе появится выходной сигналzmи автомат перейдет в состояниеak.
В случае автомата Мура, когда выходные сигналы зависят только от внутреннего состояния, в котором находится автомат, и не зависят от входных сигналов, принято обозначать выходными сигналами не ребра (стрелки), а вершины графа.
Таким образом, на графе автомата Мура каждая вершина имеет два обозначения: одно, показывающее состояние автомата, и другое – выходной сигнал, который отмечает данное состояние автомата независимо от того, каким путем (по какому ребру) пришел автомат в это состояние.
П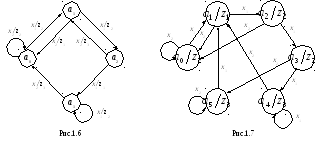 римеры
графов автоматов Мили и Мура приведены
на рис.1.6 и 1.7 соответственно.
римеры
графов автоматов Мили и Мура приведены
на рис.1.6 и 1.7 соответственно.
Граф автомата, благодаря введенным на нем обозначениям вершин и ребер, полностью задает автомат при условии, что каким-то образом, например, индексом a0, отмечена вершина графа, соответствующая начальному состоянию этого автомата.
Аналитический способ.
Перейдем к аналитическому способу задания ДУ от задания дискретного устройства без памяти (комбинационного автомата) с помощью таблицы состояний.
Таблица состояний строится для задания однозначного соответствия между комбинациями (наборами) входных сигналов и комбинациями (наборами) выходных сигналов ДУ без памяти. Сущность описания ДУ без памяти (комбинационного автомата) с помощью таблицы состояний состоит в следующем.
Если имеется nвходных сигналов, каждый из которых может принимать одно из двух значений – 0 или 1, то число возможных комбинаций (наборов) входных сигналовNможет быть определено по формулеN= 2n.
Таблица, имеющая Nстрок иn+mстолбцов, в которой для каждой строки указаны наборы значений входных сигналов и наборы значений выходных сигналов, полностью описывает функционирование комбинационного автомата. Рассмотрим пример таблицы состояний (табл.1.3). Каждому входному сигналуa,b,cприсваивается определенный разряд двоичного счисления: 20, 21, 22и т.д. (эти цифры указываются в таблице над символами входных сигналов), т.е. устанавливается база. Порядок присвоения разрядов – справа налево (правый разряд – самый младший):c→ 20= 1;b→ 21= 2;a→ 22= 4. Эти двоичные разряды называются весами входных сигналов. Тогда каждая строка таблицы состояний (каждая комбинация значений входных сигналов) характеризуется некоторым десятичным числом, называемым весовым состоянием (ВС), представляющим собой сумму весов входных сигналов, значение которых в данном наборе равно 1. Весовые состояния проставляются в специальном правом столбце таблицы.
|
|
|
|
Таблица 1.3 |
|
|
| ||||
|
|
|
|
Входные сигналы |
Выходной сигнал |
ВС |
|
|
| ||
|
|
|
|
22 |
21 |
20 |
|
|
| ||
|
|
|
|
a |
b |
c |
z |
|
|
| |
|
|
|
|
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
0 |
0 |
1 |
0 |
1 |
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
2 |
|
|
|
|
|
|
|
0 |
1 |
1 |
1 |
3 |
|
|
|
|
|
|
|
1 |
0 |
0 |
0 |
4 |
|
|
|
|
|
|
|
1 |
0 |
1 |
1 |
5 |
|
|
|
|
|
|
|
1 |
1 |
0 |
1 |
6 |
|
|
|
|
|
|
|
1 |
1 |
1 |
~ |
7 |
|
|
|
Заметим, что для ДУ с памятью весовые состояния образуются суммой весов входных сигналов и элементов памяти, принявших в данном состоянии значение 1.
Различают рабочие, запрещенные и условные комбинации входных сигналов.
Комбинации (наборы) состояний входных сигналов (а для ДУ с памятью – входных сигналов и элементов памяти), при которых данный выходной сигнал принимает значение, равное 1, называются рабочими, а соответствующие им весовые состояния – рабочими весовыми состояниями.
Так, для выходного сигнала z(табл.1.3) рабочими ВС будут 3, 5, 6.
Комбинации (наборы) состояний входных сигналов (а для ДУ с памятью – входных сигналов и элементов памяти), при которых данный выходной сигнал принимает значение, равное 0, называются запрещенными, а соответствующие им весовые состояния – запрещенными весовыми состояниями.
Для выходного сигнала z(табл.1.3) запрещенными ВС будут 0, 1, 2, 4.
Комбинации состояний входных сигналов (а для ДУ с памятью – входных сигналов и элементов памяти), при которых данный выходной сигнал может принимать любое значение (0 или 1) или которые при работе данного ДУ вообще не встречаются, называются условными, а соответствующие им весовые состояния – условными весовыми состояниями. Очевидно, что условные комбинации (ВС) включают в себя безразличные и неиспользуемые комбинации (ВС).
Для выходного сигнала z(табл.1.3) условным ВС является 7.
Таблица состояний полностью описывает функционирование ДУ без памяти, так как задаются алфавиты входов, выходов и функция выходов.
Из таблицы состояний очевидны рабочие, запрещенные и условные комбинации входных сигналов и соответствующие весовые состояния.
Если выписать из таблицы все рабочие комбинации входных сигналов, то получим аналитическую форму задания ДУ. Записывается это следующим образом (табл.1.3):
![]()
Полученное выражение означает, что выходной сигнал zпринимает значение, равное 1, в случаях, если выходные сигналы принимают значения:
a= 0,b= 1,c= 1
или
a= 1,b= 0,c= 1,
или
a= 1,b= 1,c= 0.
Присвоение входным сигналам ДУ определенных весов (выбор базы) позволяет записать условие появления сигналов на выходе в так называемой символической форме.
При этом необходимо указать базу и рабочие, запрещенные и условные весовые состояния.
Рабочие ВС указываются в виде чисел через запятую, запрещенные – так же, но в квадратных скобках, условные – в круглых скобках, а база – в виде нижних индексов у символа выходного сигнала. Например, для табл.1.3
![]()
Обычно указываются только рабочие и запрещенные ВС, остальные (до полного набора) являются условными:
![]()
Иногда
база указывается в виде функциональной
зависимости, например,
![]() Полученные выражения в виде символов
входных сигналов и в виде ВС и представляют
собой аналитическую форму задания
(описания) дискретных устройств.
Фактически эта форма представляет собой
аналитическую запись условий появления
выходного сигнала. Аналитическая форма
полностью определяет лишь ДУ без памяти.
Полученные выражения в виде символов
входных сигналов и в виде ВС и представляют
собой аналитическую форму задания
(описания) дискретных устройств.
Фактически эта форма представляет собой
аналитическую запись условий появления
выходного сигнала. Аналитическая форма
полностью определяет лишь ДУ без памяти.