

Устранение состязаний сигналов в комбинационных дискретных устройствах
Устранение состязаний сигналов в комбинационных ДУ во время переходного процесса может быть осуществлено различными методами. Рассмотрим два из них:
Метод включения фильтра на выходе ДУ.
Метод коррекции схемы путем добавления в нее логических элементов, устраняющих состязания.
П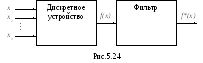 ервый
метод заключается в том, что на каждом
выходе дискретного устройства включают
специальный фильтр (рис.5.24), который
устраняет кратковременное изменение
значения выходного сигнала из-за наличия
состязаний.
ервый
метод заключается в том, что на каждом
выходе дискретного устройства включают
специальный фильтр (рис.5.24), который
устраняет кратковременное изменение
значения выходного сигнала из-за наличия
состязаний.
Фильтр представляет собой дискретное устройство, которое передает (пропускает) изменение заданного (входного) сигнала только в том случае, если обратное изменение этого сигнала произойдет не ранее чем через некоторое время τФпосле рассматриваемого. ВремяτФопределяется характеристиками фильтра.
Функциональная схема фильтра, устраняющего ложные сигналы типа риск в единице на выходе ДУ, представлена на рис.5.25.
Фильтр состоит из линии задержки Dи логического элемента ИЛИ. Если выходной сигнал ДУf(x) из-за состязаний типа риск в единице исчезнет на времяτ, то единичный выходной сигналf*(x) на выходе фильтра обеспечивается схемой ИЛИ и единичным выходным сигналом на задержкеD. Если же выходной сигнал ДУf(x) изменится с 1 на 0, то через времяτФвыходной сигнал задержкиDстанет равным 0, вследствие чего и сигналf*(x) на выходе фильтра тоже станет равным 0.
Ф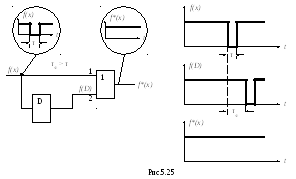 ункциональная
схема фильтра, устраняющего ложные
сигналы типа риск в нуле на выходе ДУ
(рис.5.26), состоит из линии задержкиDи логического элемента И.
ункциональная
схема фильтра, устраняющего ложные
сигналы типа риск в нуле на выходе ДУ
(рис.5.26), состоит из линии задержкиDи логического элемента И.
Если на выходе ДУ из-за состязаний типа риск в нуле появится на время τединичный выходной сигнал, то нулевой сигналf*(x) на выходе фильтра обеспечивается схемой И и нулевым выходным сигналом на задержкеD.
Основной характеристикой фильтра является время задержки τФ, которое определяется линией задержки.
П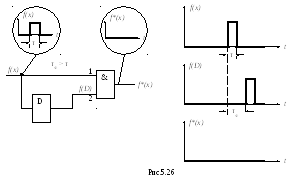 одбирая
время задержки, можно построить фильтр
с необходимыми характеристиками. Время
задержки фильтра во всех случаях должно
быть больше длительностиτложного
сигналаτФ>τ.
одбирая
время задержки, можно построить фильтр
с необходимыми характеристиками. Время
задержки фильтра во всех случаях должно
быть больше длительностиτложного
сигналаτФ>τ.
Метод добавления в схему ДУ логических элементов, устраняющих состязания, заключается в том, что в синтезированную схему ДУ вводится дополнительная часть (тоже ДУ), которая устраняет состязания данного типа.
Таким образом, задача сводится к определению логического выражения, описывающего условия функционирования дополнительной части схемы, устраняющей состязания.
Если в ДУ возможны состязания типа риск в единице, то для определения логической функции дополнительной части fg1(x) необходимо знать логическую функцию риска в единицеfP1(x) и минимальную функцию состязанийfmin(x). ФункцияfP1(x) определяется при анализе переходных процессов, а функцияfmin(x) – по формуле
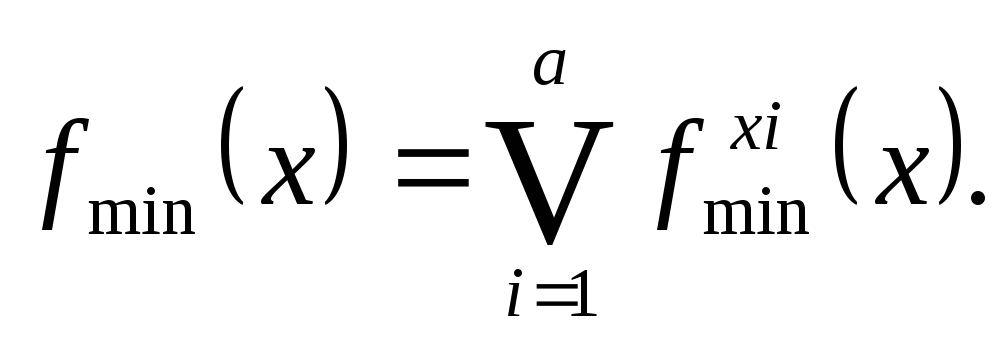
Входящие в эту
формулу функции
![]() по каждой состязующейся переменной
вычисляются по формуле
по каждой состязующейся переменной
вычисляются по формуле
![]()
где

Логическая функция fg1(x) должна иметь в качестве рабочих наборов (весовых состояний) рабочие наборы функцииfP1(x), а в качестве запрещенных наборов (весовых состояний) – запрещенные наборы функцииfmin(x).
Это правило мы принимаем без строгого доказательства, приведем лишь некоторые пояснения.
Дополнительная схема fg1(x) должна обеспечить единичный сигнал на выходе схемы ДУ именно на тех входных наборах (весовых состояниях), на которых возможны состязания типа риск в единице, а это как раз и есть рабочие наборы функцииfP1(x). Значит, функцияfg1(x) должна принимать значения, равные 1, на тех же наборах, на которых равна 1 и функцияfP1(x).
С другой стороны, дополнительная часть не должна вносить помех в работу схемы ДУ, т.е. на всех запрещенных наборах при любых значениях состязующихся переменных на выходе ее должен отсутствовать единичный сигнал. А это как раз и означает, что функция fg1(x) должна принимать значение 0 на запрещенных наборах функцииfmin(x), т.е. эти наборы являются также запрещенными для функцииfg1(x).
Полученное выражение fg1(x) логически суммируют с исходной формулой ДУf(x). Таким образом, функционирование ДУ, свободного от состязаний сигналов, опишется формулой
![]()
Приведенное выражение справедливо, так как в те моменты времени, когда на выходе схемы, описываемой функцией f(x), ложно отсутствует сигнал, единичное значение выходного сигнала ДУ обеспечивается дополнительной схемой, описываемой функциейfg1(x), причем последняя функция получена таким образом, что никаких искажений в работу ДУ не вносит.
П р и м е р 3. Устранить состязания типа риск в единице для ДУ, построенного в примере 1, в котором было определено:
![]()
Так как состязания возможны лишь по одной переменной x2, то
![]()
Определим
![]() для функции
для функции![]()

Итак,
![]()
Выразим fmin(x) в символической форме при базеx1x2x3x4:
![]()
Этот
же результат может быть получен, если
определить инверсную функцию
![]() и найти ее рабочие ВС. Именно они и будут
запрещенными наборами для функцииfmin(x).
и найти ее рабочие ВС. Именно они и будут
запрещенными наборами для функцииfmin(x).
![]()
Отсюда получаем символическую форму записи условий функционирования дополнительной части
![]()
По данным условиям работы, минимизировав их (по решетке соседних чисел или методом поразрядного сравнения), будем иметь:
![]()
Итак, для рассматриваемого ДУ получаем:
![]()
Для реализации схемы на элементах И-НЕ преобразуем функцию к виду:
![]()
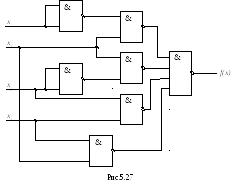
Функциональная схема ДУ, свободного от состязаний сигналов, построенная в соответствии с этой формулой, изображена на рис.5.27.
Если в схеме ДУ имеются состязания типа риск в нуле, то для определения логической функции дополнительной части fg0(x) необходимо знать логическую функцию риска в нулеfP0(x) и максимальную функцию состязанийfmax(x), которая определяется по соотношению
Входящие в эту
формулу функции
![]() по каждой состязующейся переменной
вычисляются по формуле
по каждой состязующейся переменной
вычисляются по формуле
![]()
Логическая функция fg0(x) должна иметь в качестве рабочих наборов (весовых состояний) рабочие наборы функцииfmax(x), a в качестве запрещенных – запрещенные наборы функцииfP0(x).
Дополнительная схема fg0(x) должна обеспечить отсутствие единичного сигнала на выходе ДУ именно на тех входных наборах (весовых состояниях), на которых возможны состязания типа риск в нуле, а это как раз и есть запрещенные наборы функцииfP0(x).
Таким образом, функция fg0(x) должна принимать значение, равное 0, на тех же наборах, что и функцияfP0(x), т.е. функцииfg0(x) иfP0(x) имеют одинаковые запрещенные наборы.
Функция fg0(x) не должна вносить помех в работу схемы ДУ, т.е. на всех рабочих наборах при любых значениях состязующихся переменных на выходе ее должен быть единичный сигнал. А это как раз и означает, что функцияfg0(x) должна принимать значение 1 на рабочих наборах функцииfmax(x), т.е. эти наборы являются также рабочими для функцииfg0(x).
Полученное выражение fg0(x) необходимо включить в исходную формулуf(x), описывающую условия функционирования ДУ, в качестве конъюнктивного члена:
![]()
Схема ДУ, построенная в соответствии с этим выражением, свободна от состязаний типа риск в нуле.
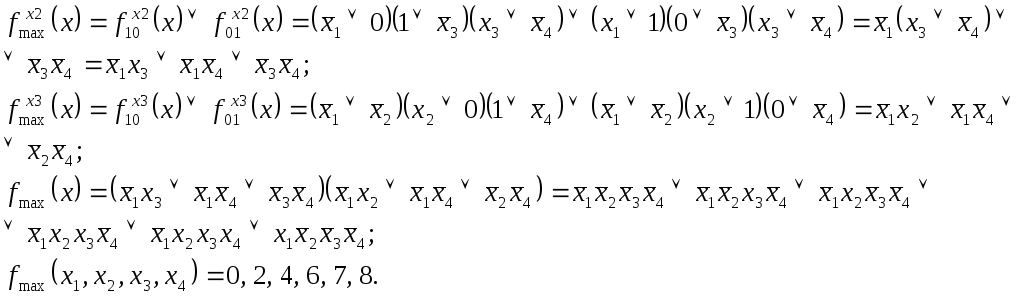
П р и м е р 4. Устранить состязания типа риск в нуле для ДУ, построенного в примере 2.
В примере 2 были определены запрещенные наборы функции
![]()
Определим функцию
![]() и ее рабочие наборы.
и ее рабочие наборы.
Для функции
![]()
Получаем символическую форму записи условий функционирования дополнительной части:
![]()
По данным условиям
работы, минимизировав их, получаем (для
нахождения КНФ сначала синтезируем
функцию
![]() по запрещенным состояниям, а затем
инверсируем ее):
по запрещенным состояниям, а затем
инверсируем ее):
![]()
Отсюда
![]()
Для реализации схемы на элементах И-НЕ преобразуем функцию к виду
![]()
Построенная в соответствии с этой формулой функциональная схема ДУ, свободного от состязаний сигналов, представлена на рис.5.27.