

3. Специальная часть.
3.1 Проектировочный расчет насоса с эпициклоидальным зацеплением.
1. Дано:
М = 11000 кг/час – максимальная производительность;
n = 4150 об/мин – число оборотов;
γ = 0,78 – удельный вес;
Рабочий объем вычисляется по формуле:
V= М/(n*γ *60); (3.1)
V= (11000*1000)/(4150*0,78*60) = 56,63 см3/об;
2. z – число зубьев;
z = 6 – 8, принимаем z = 6.
3. λ = 0,7 – коэффициент сжатия;
4. Определяем углы точек перегиба:
ηе min 1 = 0;
ηе
min
2 =
 ;
(3.2)
;
(3.2)
ηе
min
2 =
 12,64
12,64
5.
Определяем отношение
![]() :
:
 ,
(3.3)
,
(3.3)
где η = ηе min 2
 2,81
2,81
6. Определяем коэффициент υ:
0
≤ υ ≤
![]() ;
;
вариация
υ ≤
![]() и υ = 2;
и υ = 2;
7. Вычисляем функцию f(z, λ, υ):
f(z,
λ, υ) =
![]() (3.4)
(3.4)
f(z,
λ, υ) =
![]() 33,375
33,375
8. Принимаем ширину колеса b = a*m,
где a – коэффициент пропорциональности;
а = 1- 1,5;
принимаем а = 1,5.
9. Определяем модуль m:
![]() ;
(3.5)
;
(3.5)
![]() =1,13
см.
=1,13
см.
b = 1,5*1,13 = 1,697см.
10. Радиус вспомогательной окружности:
ρ = m/2; (3.6)
ρ = 1,13/2 = 0,565 см.
11. Определяем геометрические размеры колес:
rb1, ra1, rf1, rw1 - геометрические размеры 1-ого колеса;
rb2, ra2, rf2, rw2 - геометрические размеры 2-ого колеса;
rb1=![]() ;
(3.7)
;
(3.7)
rb1=![]() =3,38см;
=3,38см;
rb2=![]() ;
(3.8)
;
(3.8)
rb2=![]() =
3,95 см;
=
3,95 см;
Радиус головок зубьев
ra1=![]() ;
(3.9)
;
(3.9)
ra1=![]() =
3,22см;
=
3,22см;
ra2=![]() ;
(3.10)
;
(3.10)
ra2=![]() =
2,82см;
=
2,82см;
Радиус впадин (оснований) зубьев
rf1=![]() ;
(3.11)
;
(3.11)
rf1=![]() =
2,43см;
=
2,43см;
rf2=![]() ;
(3.12)
;
(3.12)
rf2=![]() =
3,61 см;
=
3,61 см;
Радиус окружностей обката
rw1=![]() ;
(3.13)
;
(3.13)
rw1=![]() =
2,37 см;
=
2,37 см;
rw2=![]() ;
(3.14)
;
(3.14)
rw2=![]() =
2,76 см.
=
2,76 см.
12. Выполняем профилирование колес:
Уравнения внутренней (ведущей) шестерни насоса выглядят следующим образом:
 (3.15)
(3.15)
где xh,yh – координаты точек шестерни;
ρ – радиус образующей окружности;
z1 = 6 – число зубьев шестерни;
λ1 = 0,7– коэффициент сжатия;
η – текущий угол;
Внешняя (ведомая) шестерня смещена относительно внутренней шестерни на эксцентриситет е = 4,1мм.
Уравнения внешней (ведомой) шестерни насоса выглядят следующим образом:
 (3.16)
(3.16)
где xh,yh – координаты точек шестерни;
z2 = z1 +1; – число зубьев шестерни;
λ2 = 0,98 – коэффициент сжатия;
Для профилирования колес воспользуемся программой MatLab v5.3. Подробнее в приложении 3. (подставив в нее формулы (3.15), (3.16))
Алгоритм, записываемый в программе MatLab:
t=0:pi/180:2*pi;
x=0.565*6*cos(t)+0.565*0.98*cos(t*6)-0.41;
y=0.565*6*sin(t)-0.565*0.98*sin(t*6);
[t,r]=cart2pol(x,y);
polar(t,r);
hold on
t1=0:pi/180:2*pi;
x1=0.565*5*cos(t1)+0.565*0.7*cos(t1*5);
y1=0.565*5*sin(t1)-0.565*0.7*sin(t1*5);
[t1,r1]=cart2pol(x1,y1);
polar(t1,r1)
На рисунке 3.1 видим полученный теоретический профиль колес.
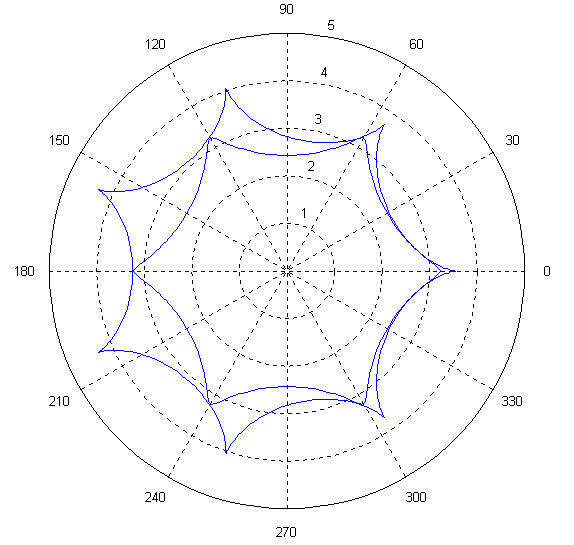
Рисунок 3.1 Профиль колес.