

Metod_ukaz_po_DRавтом.пр.проц.в маш.(норко)
.pdfРис.1.16. Расчетная схема захватногого устройства с рычажиым механизмом
Данный захват обладает эффектом самоблокировки, так какрычаг проходит через «мертвое» центральное положение.
Рис.1.17. Расчетная схема захватного устройства с клиновым механизмом
Для захватного устройства с клиновым механизмом сила привода
(рис.1.17)
P η = (∑j=1…n Mj tg (β + ρ))/ b ,
где р — приведенный угол трения, учитывающий сопротивление осей рычагов (при осях на подшипниках качения р — 1○10'; на подшипниках скольжения р = 3°); п — число губок захвата (обычно п = 2); т\ = 0,95 — КПД шарниров; р = 4°- 8° — угол клина.
Для захватов с симметричным расположением губок при М1=М2 = М сила привода
P η =( 2 M tg (β + ρ))/ b .
Для захватных устройств, показанных на рис.18, соотношения между
силами Р и F- следующие: |
|
P =( F/η) (2 l)/ (a sin ɵ) |
(рис.1.18а) |
P =( F/η) (b / (b + c) |
(рис.1.18б) |
P =( F/η) (b sin ɵ sin (2 Ф))/( l sin Ф sin (ɵ + Ф)) (рис.1.18в) |
|
P =( F/η) (a c) / ( b ( c – d)) |
(рис.1.18г) |
P =( F/η) (2 b/ c) tg ɵ |
(рис.1.18д) |
P =( F/η) (2 b/ a) |
(рис.1.18е) |
P =( F/η) (2 b c) / ( l ( c + d)) |
(рис.1.18ж) |
P =( F/η) (a d) / ( b ( c – d)) |
(рис.1.18з) |
P =( F/η) (2 b/ a) cos2 ɵ |
(рис.10и) |
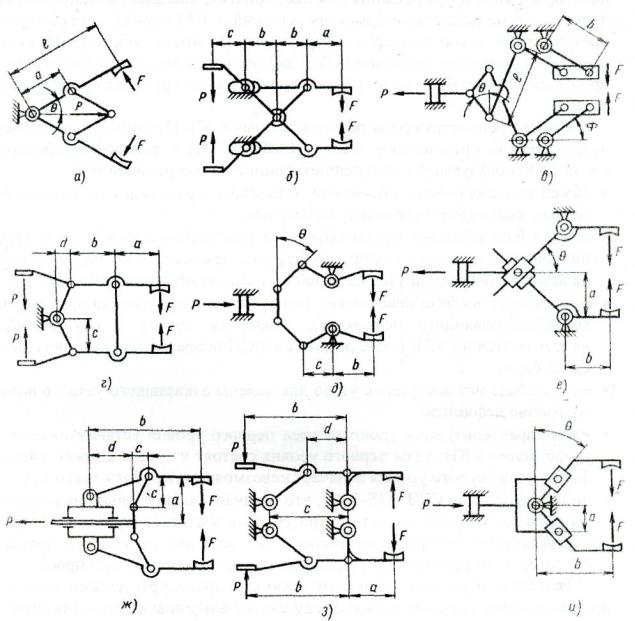
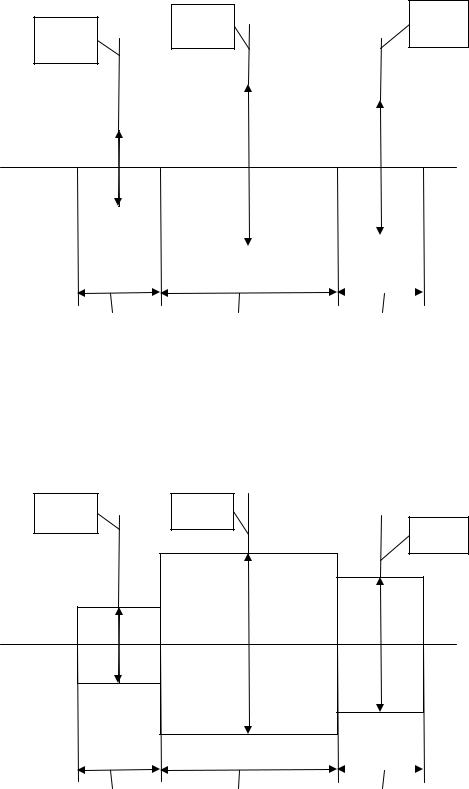
Рис.1. 18. Схемы захватных устройств ПР.
Если захватное устройство имеет несколько губок, то сила захвата на каждой губке
R1=(l-c)Q/l и R2=cQ/l –для схемы, приведенной на рис 1.19а; R1=(l+c)Q/l и R2=cQ/l –для схемы, приведенной на рис. 1.19б.
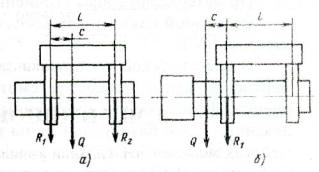
Рис 1.19. Схемы для определения сил, действующих, на губки от силы тяжести
Силы захватывания, которые требуются для удержания заготовки в процессе ее перемещения,
F = К1К2К3 mg,
где т - масса заготовки; g — ускорение свободного падения; К1 - коэффициент безопасности, значение которого зависят от условия применения ПР и расположения других элементов РТК; К1 = 1,2— 2,0; К2 — коэффициент, зависящий от максимального ускорения А, с которым робот перемещает заготовку, закрепленную в его захвате; К2=1+А/g; К3- коэффициент передачи, зависящий от конструкции захвата и расположения в нем заготовки.
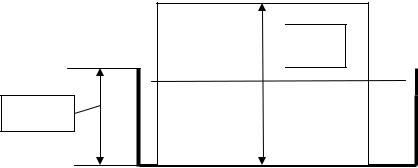
Например, для двухшарнирного захвата (рис, 1.20)
Рdх = 2Fb dɵ;
здесь dх — малое перемещение привода; dɵ - соответствующее малое перемещение губки (угловое).
Так как R2 = R1 + mg, в предельном случае при Р = Рmin имеем R1=0; R2= тg, причем
Рmin dх= R1h dɵ +R2b dɵ= mg b dɵ,
где R1 и R2 — силы, действующие на губки.
Тогда
F/ ( mg) = K3 =1/2.
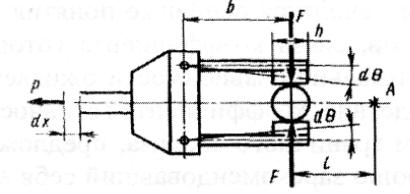
Таким образом, для данной конструкции захвата К3 = 1/2. В табл. 1.11 приведены значения К3 для различных относительных расположений захвата и заготовки.
Рис.1. 20. Двухшариирное захватное устройство; точка А центр тяжести консольно-закрепленной заготовки
Сила захватывания для схемы, приведенной на рис.1.21 а,
N1 =( Rn sin α2)/ ( sin (α1 + α2) N2 =( Rn sin α1)/ ( sin (α1 + α2)
где Rп - реакция от расчетной нагрузки на п-й захват; α 1 , α 2 — углы контакта заготовки с губкой.
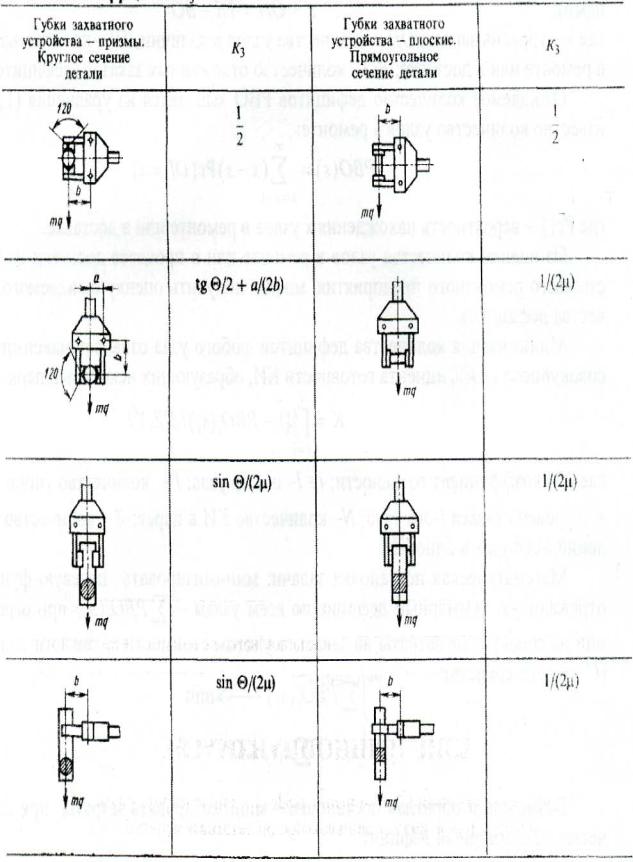
Таблица 1.11. Зиачеяия коэффициента К3
Сила захватывания для схемы, приведенной на рис.1. 21 6,
N1 = Rn / ( 2Cosα1 ); F1 = μ N1 ,
где Ni — нормальная сила для 1-й точки контакта; Fi — сила трения в i-й точке контакта; Кn — реакция на n-и захват от расчетной нагрузки;αi — угол контакта поворотной центрирующей или призматической губки с заготовкой для 1-й точки контакта; μ - коэффициент трения губки захвата о деталь; для незакаленных губок без насечки (стали 45, 50)μ= 0,12 - 0.15; для закаленных губок в виде гребенки с острой насечкой (стали 651. 60С2. У8А, У10А) при твердости HRС > 55μ = 0,3 - 0,35.
Для плоскопризматических губок (рис.1. 21 в) сила захватывания
N1 = Rn tg α1 , F1 = μ N1 , N2 = Rn / cos α2 , |
F2 = μ N2 , |
где N1 и N 2 — нормальные силы; F1 |
F2 — силы трения; α1= =90° - |
угол между силами Rn и N1; α 2 — угол между силами Rn и N2;Rn=R2 — реакция от расчетной нагрузки на i - захват.
Для плоских губок |
{рис. 1.22 г ) силы захватывания |
N1 = N2 =Rn / (2 μ ) , |
F1 = F2 = μ N1 = μ N2 , |
где: N1 и N 2 — нормальные силы; F1 F2 — силы трения. Силы захватывания для схемы нагружения показанной на рис,1.22 д.
Ni =( Rn sin αi) / (μ (sin α1 + sin α2 + sin α3) , Fi = μ Ni ,
где N1 и N 2 — нормальные силы; F1 F2 — силы трения; α1= =90° - угол между силами Rn и N1; α 2 — угол между силами Rn и N2;Rn=R2 — реакция от расчетной нагрузки на i - захват.
2.Проектирование лотковой системы ориентации и транспортировки заготовок
Проектирование лотковой системы ориентации и транспортировки рассмотрим на примере заготовок, эскизы которых приведены на рис. 2.1 и
2.2.
d2 |
d3 |
d1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 |
|
|
l2 |
|
|
|
l3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.1. . Трехступенчатая осесимметричная деталь с квадратными сечениями и со сторонами d1 , d2 и d3 .
Ød1 Ød2
Ød3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 |
|
|
l2 |
|
l3 |
|
||||
Рис. 2.2.. Трехступенчатый вал с диаметрами ступеней |
Ød1 , Ød2 и Ød3 |
|||||||||||
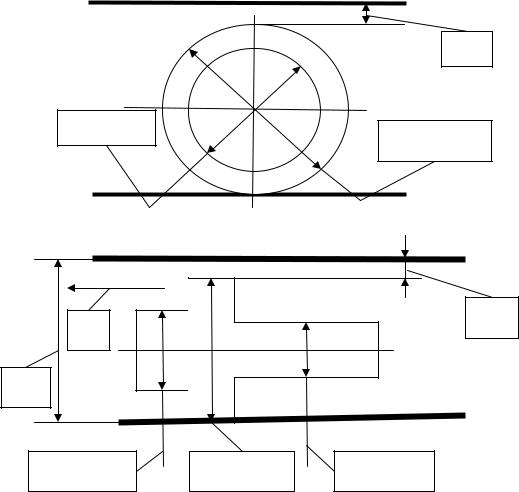
Для определения ширину и высоты бортов лотка необходимо пользоваться данными табл. 1.2 и чертежом заготовки. На этом этапе необходимо принимать решение о форме профиля лотка, т.е. лоток открытый или
закрытый. Форма профиля лотка должна обеспечивать удобство его обслуживания в процессе эксплуатации и исключить выпадение заготовок во время их перемещения.
В рассматриваемом случае на основании табл.1.2. пользуемся эскизами, которые приведены на рис.2.3 и рис.2.4.
Ширина лотка (рис. 2.4 ) при перемещении заготовок по направлению к её большой оси определяется по следующей формуле
Вл = d2 + Δd |
( 2.1 ) |
где Δd = (1…3) мм. |
|
Величина Δd , определяющая зазор между перемещаемой заготовкой и бортом лотка , должна быть больше допуска наибольшего размера заготовки в поперечном направлении по отношению к направлению движения заготовки. Значение допуска размера d2.определяется на основании чертежа заготовки и табл. 1.4. С учетом сказанного должно выполняться следующее условие
Δd ≥ 1 мм |
|
Т d2 < Δd < 3 мм. |
( 2.2 ) |
 d
d
Нб
Рис. 2.3. Эскиз для определения высоты борта лотка
d
Ød3 |
Ød2 |
|
|
v |
Δd |
|
|
|
Bл |
|
|
Ød3 |
Ød2 |
Ød1 |
Рис. 2.4. Эскиз для определения ширины лотка
Зазор , определяемый по формуле ( 2.1 ) , должен исключить заклинение заготовки в осевом направлении.
Высота борта ( рис. 2.3 ) открытого лотка определяется по формуле:
- для цилиндрических заготовок Нб = (0.5…0.6 ) d; |
( 2.3 ) |
|
- для колец и дисков |
Нб > 0.6 d , |
( 2.4 ) |
где d – наибольший диаметр цилиндрической заготовки или сторона наибольшего сечения осесимметричной заготовки (в рассматриваемом варианте d = d2 ).
При движении заготовки по лотку заготовка будет касаться бортов лотка . Касание будет происходить по вершинам наибольшей диагонали заготовки . Рассматриваемая заготовка имеет четыре различных диагоналей , которые показаны на рис. 2.5.