

Особенности цифрового управления процессами Управление процессом в реальном времени
Компьютеры, управляющие процессами, имеют другие задачи, нежели компьютеры, используемые для "классической" обработки информации. Основная разница состоит в том, что управляющий компьютер должен работать со скоростью, соответствующей скорости процесса (рис.1.2). Само понятие "реальное время" указывает на то, что в реакции компьютерной системы на внешние события не должно быть заметного запаздывания

Рис. 1.2. Применение компьютера в управлении процессом
Другая главная особенность компьютерного управления процессом заключается в том, что ход исполнения программы нельзя определить заранее. Внешние сигналы могут прерывать или изменять последовательность исполнения операторов программы, причем для каждого нового прогона по-разному. Кроме того, существует проблема эффективного использования ресурсов компьютерной системы с учетом временных ограничений. Все это требует специальных методов программирования. Дополнительную проблему представляет собой тестирование систем реального времени из-за отсутствия предсказуемого порядка выполнения операторов программы по сравнению с обычными компьютерными системами.
Параллельность — одно из важных свойств реального мира. Все события вокруг нас, мы сами и фактически любые физические процессы можно представить в виде множества "подпроцессов", которые протекают параллельно. Из этого свойства следует важный вывод: компьютер, взаимодействующий с таким процессом или управляющий им, должен учитывать эту параллельную природу, а в некоторых ситуациях и работать в соответствии с ней. Естественным следствием параллельной природы реального мира является то, что компьютер должен уметь управлять параллельными задачами. В этом и заключается отличие управляющего компьютера от обычного, для которого естественным является последовательный режим.
Пример: Пресс для пластика
Управление прессом для пластика — это пример типичной задачи компьютерного управления процессом.
Компьютер должен одновременно регулировать температуру (поддерживать ее постоянной) и координировать последовательность технологических операций. Если применять обычные методы программирования, то задача структурирования программы становится неразрешимой. Поэтому требуется другой подход
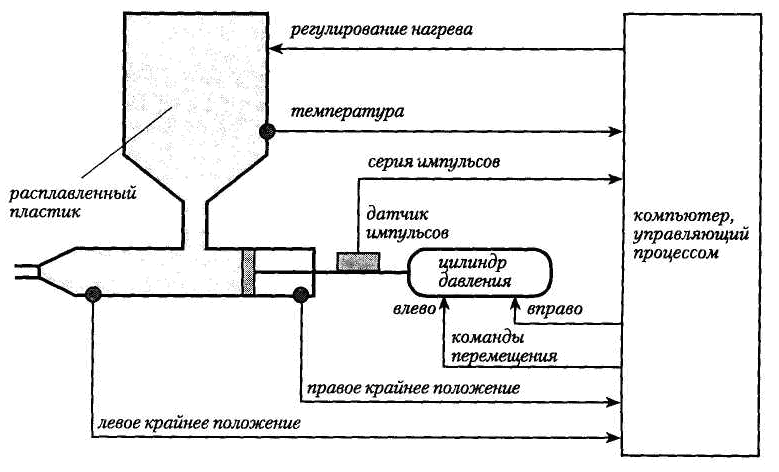
Рис.1.3 Пресс для пластика
Пресс для пластика представлен на рис. 1.3. Контейнер содержит расплавленный пластический материал; температура пластика должна поддерживаться в пределах узкого диапазона. Управляющий компьютер периодически считывает текущую температуру и рассчитывает тепло, необходимое для ее поддержания на требуемом уровне. Тепло поступает от нагревательного элемента, управляемого компьютером. Время его работы согласовано с количеством тепла, которое необходимо подвести.
Нижняя часть пресса состоит из поршня, выталкивающего определенное количество расплавленного пластика через насадку. Когда поршень находится в крайнем правом положении, цилиндр заполняется пластиком. Затем поршень быстро перемещается влево, выдавливая требуемое количество пластика. Положение поршня контролирует импульсный датчик, генерирующий определенное число импульсов на каждый миллиметр перемещения, а объем выдавливаемого пластического материала определяется числом импульсов за время перемещения. Движение поршня прекращается при достижении заданного числа импульсов.
Чтобы обеспечить приемлемую производительность, температура пластика должна иметь заданное значение к тому моменту, когда поршень при движении вправо минует выходное отверстие контейнера.
Компьютерная система должна регулировать температуру и движение поршня одновременно. Значение температуры поступает в виде непрерывного сигнала от датчика. Положение поршня рассчитывается исходя из числа импульсов. Кроме того, еще два датчика генерируют двоичные сигналы при достижении поршнем крайнего положения. Компьютер не содержит отдельного внутреннего интервального таймера и поэтому должен отсчитывать время с помощью счетчика сигналов от внешнего источника времени.