

21.4. Электродвигатели постоянного тока
Электродвигатели постоянного тока в отличие от синхронных и асинхронных электродвигателей способны обеспечить любые механические характеристики, могут в больших пределах и плавно изменять частоту вращения, а также надежно работать при пониженной частоте вращения, частых пусках, реверсах и остановках. Однако электродвигатели постоянного тока значительно сложнее в конструктивном отношении, поэтому менее надежны в работе и нуждаются в более тщательном уходе; они дороже синхронных и асинхронных электродвигателей и могут быть использованы только при наличии преобразователей переменного тока в постоянный, которые дополнительно уменьшают надежность работы установки и увеличивают капитальные затраты и эксплуатационные расходы. Поэтому электродвигатели постоянного тока используют в основном лишь в тех случаях, когда необходимо широкое и плавное регулирование частоты вращения рабочей машины или последняя работает в повторно-кратковременном режиме. На электростанциях электродвигатели постоянного тока применяют также для привода некоторых ответственных резервных машин небольшой мощности, не требующих регулирования частоты вращения, когда по соображениям надежности в
качестве резервного источника электроэнергии используется аккумуляторная батарея.
Наибольшее применение в электроприводе получили электродвигатели параллельного возбуждения, так как в , большинстве случаев их характеристики более полно соответствуют характеристикам рабочих машин. Однако находят некоторое применение и электродвигатели с другими схемами возбуждения.
Независимо от схемы включения обмотки возбуждения электродвигателя постоянного тока связь между его магнитным потоком, ЭДС, током якоря, частотой вращения, электромагнитным моментом и подведенным напряжением определяется следующими выражениями:

где

Е — ЭДС электродвигателя; Iя - ток якоря; Rя — сопротивление последовательно соединенных обмоток в цепи якоря; ΔUщ — падение напряжения в щетках; Rp — сопротивление резистора, включенного в цепь якоря; п — частота вращения; Ф — магнитный поток одного полюса; р — число пар главных полюсов электродвигателя; Nя - число проводников обмотки якоря; ая — число пар параллельных ветвей обмотки якоря. Из выражений (21.28) и (21.29) следует
![]()
С учетом (21.30)
![]()
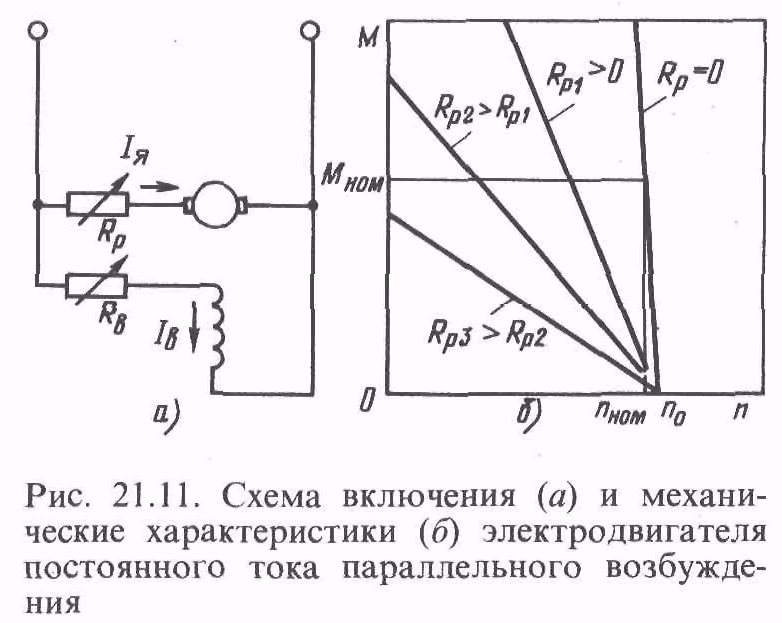
У электродвигателей параллельного возбуждения (рис. 21.11,а), снабженных дополнительными полюсами и компенсационной обмоткой (дополнительные полюсы имеют почти все машины постоянного тока мощностью более 1 кВт, а компенсационную обмотку — многие машины средней и большой мощности), магнитный поток можно считать не зависящим от тока якоря. Поэтому при неизменном токе возбуждения уравнение механической характеристики таких электродвигателей имеет простой вид
![]()
где
![]()
Уравнение (21.33) показывает, что в случае постоянства напряжения питающей сети механические характеристики электродвигателей параллельного возбуждения представляют собой прямые, наклон которых определяется сопро-
тивлением резистора Rp, включенного в цепь якоря (рис. 21.11, б). Все эти прямые сходятся в одной точке, которой соответствует частота вращения n0 = =U/kE, называемая частотой вращения идеального холостого хода. Наиболее жесткой является естественная характеристика, которая получается при отсутствии добавочных сопротивлений в якорной цепи; в последнем случае изменение нагрузки электродвигателя от нуля до номинальной приводит к снижению частоты вращения не более чем на 7 — 8%.
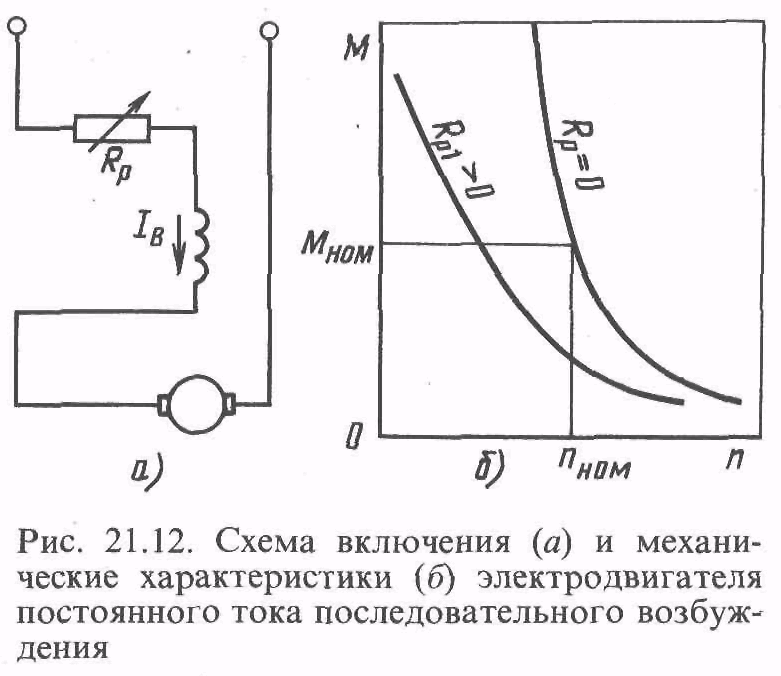
У электродвигателей последовательного возбуждения (рис. 21.12, а) ток якоря одновременно является током возбуждения, поэтому магнитный поток изменяется с изменением их нагрузки.
При небольших нагрузках электродвигателя последовательного возбуждения его магнитная цепь не насыщена, т. е. магнитный поток пропорционален току якоря:
![]()
где сФ — постоянная величина. Поэтому электромагнитный момент, как видно из (21.30), пропорционален квадрату магнитного потока и уравнение механической характеристики (21.32) имеет вид

Таким образом, механическая характеристика электродвигателя последовательного возбуждения при малых нагрузках имеет гиперболический характер, как показано на рис. 21.12, б. С уменьшением нагрузки магнитный поток электродвигателя быстро уменьшается и частота вращения резко возрастает. Правда, наличие механических потерь, обусловленных трением, а также небольшого потока намагничивания приводит к тому, что частота вращения электродвигателя при холостом ходе оказывается ограниченной. Однако она может превышать номинальную в 5 — 6 раз, тогда как по условиям механической прочности бандажей ротора и коллектора превышение номинальной частоты вращения более чем в 3 — 3,5 раза недопустимо. Поэтому нагрузку электродвигателей последовательного возбуждения нельзя снижать более чем до 15 — 20% номинальной.
Рост нагрузки электродвигателя сопровождается насыщением его магнитной системы, в результате чего увеличение магнитного потока сначала замедляется, а затем практически совсем прекращается. Поэтому при больших нагрузках механические характеристики близки к линейным. Увеличение сопротивления якорной цепи электродвигателя последовательного возбуждения приводит к смещению его механической характеристики и к уменьшению ее жесткости (рис. 21.12,6).
Электродвигатели последовательного возбуждения применяют в основном

в электротяговых и подъемных устройствах.
Электродвигатели смешанного возбуждения имеют две обмотки возбуждения — параллельную и последовательную (рис. 21.13, а). Поэтому магнитный поток таких машин зависит от токов обеих обмоток, а механические характеристики сочетают в себе свойства характеристик двигателей как параллельного, так и последовательного возбуждения (рис. 21.13, б) и зависят от доли участия той или иной обмотки в создании магнитного потока. Благодаря параллельной обмотке возбуждения магнитный поток машины даже при отсутствии нагрузки остается значительным, поэтому работа электродвигателя на холостом ходу допустима. А наличие последовательной обмотки возбуждения приводит к увеличению пускового момента и уменьшению частоты вращения электродвигателя при его нагрузке. С увеличением сопротивления цепи якоря механические характеристики электродвигателя смешанного возбуждения, как это видно из рис. 21,13,6, смещаются и становятся более мягкими, однако независимо от сопротивления Rp при отсутствии нагрузки все характеристики проходят через одну точку, соответствующую частоте вращения идеального холостого хода.