

13. Матричные модели ГО.
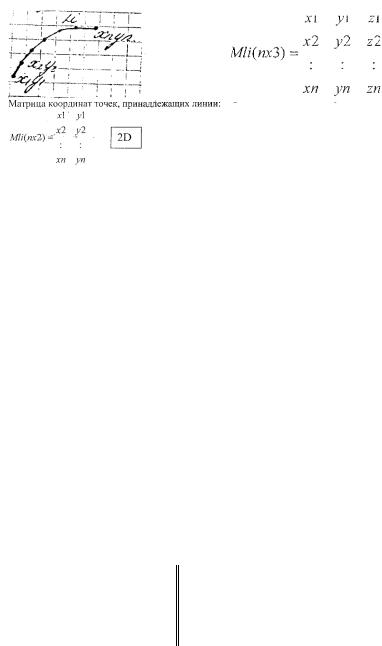
Матричная модель Го в декартовых координатах этот тип модели используется для описания совокупности линий на поверхности либо в пространстве по средством замены исходной прямой на ломанную линию, проходящую через совокупность точек, принадлежащих исходной линии.
Проблема: формализация системных параметров ГО.
, где Мli – это совокупность матриц
Независимо от формы объекта, описание одинаково (матрица).
Хранение информации: списковая структура, указатели которой системные параметры (показывают структуру взаимодействия частей ГО), содержимое – матрица. Достоинство: универсальность, емкие библиотеки по этим объектам: вызвать по соответствующему
имени нужный объект.
2) Матричная модель в однородной системе координат.
Этот тип модели используется для описания совокупности линий на плоскости и в пространстве в однородных координатах.
|
|
wx1 |
wy1 |
w |
|
|
wx1 |
wy1 |
wz1 |
w |
|
||
|
|
|
|
|
|||||||||
|
|
|
|
||||||||||
|
|
|
|
wx2 |
wy2 |
wz2 |
w |
|
|||||
L |
= |
wx |
2 |
wy |
2 |
w |
L |
= |
|
||||
n*3 |
|
|
|
|
n*4 |
|
.... .... .... .... |
|
|||||
|
|
wxn |
wyn |
w |
|
|
|
||||||
|
|
|
|
wxn |
wyn |
wzn |
w |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
Обратный переход от (n+1) – мерного пространства к n – мерному осуществляется путем проецирования.
Преимущества: Уходим от особых точек (Если w =0 , то можно показать бесконечную точку); В однородных координатах
разрешены совмещенные преобразования (выполнение нескольких преобразований). Недостатки: Усложнение матрицы; Увеличение объема памяти.
|
wx |
wy |
wI |
1 |
|
A = (wx1 wy1 w) |
|
||||||
|
|
|
|||||||||||
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
αn*3 = |
wx2 |
wy2 |
wI2 |
|
↓ проекция |
|
|
||||||
|
wx |
n |
wy |
n |
wI |
n |
|
wx |
wy |
|
→(x y ) |
||
|
|
|
|
|
|
1 , |
1 |
|
|||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
w |
w |
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
||||
3) Матричная модель в обобщенных координатах
Эта модель строится путем добавления еще одного столбца связности.
i=1, то текущая точка связана с предыдущей;
i=0 , то не связана; i(1) проверяется с i(n)
|
|
|
wx1 |
wy1 |
w |
I1 |
|
|
|
||||
α |
n*3 |
= |
wx2 |
wy2 |
w |
I2 |
|
|
... |
... |
... ... |
||
|
|
|
||||
|
|
|
wxn |
wyn |
w |
In |
Преимущества: Одинаковое представление объектов; Мощная математика для оперирования над матрицами; Удобство представления операций над матрицами( B =T × A ; T = A−1 ×B ).

14. Модели преобразования ГО и их классификация.
ТГО – типовые графические операции. К специальным операциям также относят: нелинейные преобразования:
1.композиция;
2.декомпозиция.
Связь 3D и 2D – проецирование, сечение, удаление невидимых линий.
15. |
Линейные преобразования ГО (масштабирование, поворот, сдвиг). |
|
|
|
|
|
|
|||||||
Сдвиг (move): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x’=x+∆x |
|
|1 0 0 0| |
|
|
|wx1 wy1 w| |
|1 |
0 |
0 | |
|wx1’ wy1’ w| |
|
|||
|
y’=y+∆y |
|
|0 1 0 0| - матрица |
|
|wx2 wy2 w| |
* |0 |
1 |
0 | |
… |
|
|
|||
в |
|
|
в 3D: |
сдвига |
|
res= |
… |
= |
|
|
|wxn’ wyn’ w| |
|
||
2D: |
|
|
|0 0 1 0| |
|
|wxn wyn w| |
|∆x ∆y |
|
|
|
|||||
|
|
|
|
|
|
|
однородные |
1| |
|
|
|
|
|
|
Масштабирование (block). 2D x’=Mx*x, y’=My*y |
|
|
координаты |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|Mx 0 0 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|0 My 0 | - матрица масштаба |
|
|
|
|
|
|
|
|
|
|
|
|||
| 0 0 |
1 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
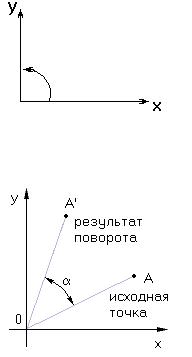
Поворот (rotate): |
|
|
|
=R*cosα*cosα-R*sinα*sinθ=R*cosθ(x/R)- |cosθ -sinθ |
0| |
|||||||||
X=R*cosα |
– |
использование |
X=R*cos(α+θ) |
|
||||||||||
данных; после поворота |
R*sinθ(y/R) = x*cosθ-y*sinθ = x’ |
|
|
|
|
|
|cosθ |
sinθ |
0| |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
| 0 |
0 |
1| |
Y=R*sinα |
|
|
Y=R*sin(α+θ) = R*cosα*sinθ -R*sinα*cosθ=R*sinθ(x/R)- |
|
|
|||||||||
|
|
|
|
R*cosθ(y/R) = x*sinθ+y*cosθ = y’ |
|
|
|
|
|
|
|
|
||
Совмещённое преобразование: обязательно задаётся алгоритм действий: 1) сдвиг 2) поворот 3) масштаб. |
|
|
||||||||||||
Масштабирование |
|
|
|
|
|
|
|
|
|
|
|
|
||
Для масштабирования объекта каждую точку необходимо растянуть в Sx раз по оси х и в Sy раз по оси у. |
|
|
||||||||||||
х' = х . Sx |
у' = у. Sy |
|
|
|
|
|
|
|
|
|
|
|
||
Определяя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S= |
| Sx 0 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0 |
Sy | |
|
|
|
|
|
|
|
|
или P'=P . S
Отметим, что масштабирование производится относительно начала координат. Масштабирование относительно других точек рассмотрим ниже.
Если Sx != Sy неоднородное масштабирование. Если Sx = Sy однородное масштабирование. Поворот
Объект может быть повернут, ели координаты каждой его точки будут подвергнуты преобразованию x' = х.cosθ-y.sinθ
у' = х.sinθ-y.cosθ
В матричной форме
[x' у']=[x у] |
| |
cosθ |
sinθ |
| |
|
| |
-sinθ |
cosθ |
| |
||
|
или Р' = Р . R
Положительным считаются углы, измеряемые против движения часовой стрелки от X к Y.
В случае отрицательных углов можно воспользоваться тождествами cos(-θ)= cos(θ)
sin(-θ)=-sin(θ)
Поворот производится относительно начала координат
Однородные координаты Преобразования переноса, масштабирования и поворота в матричной форме записываются как
P' = P + T
P' = P . S
P' = P . R
К сожалению, перенос в отличие от других реализуется с помощьюсложения. Хотелось бы преобразования представить в такой форме, чтобы все эти элементарные преобразования можно было бы представить в одной форме - в виде произведений матриц. Тогда удастся совместить все три вида преобразований в виде умножения на одну результирующую матрицу геометрических преобразований.