

4.2 Наука о движении - кинематика и ее законы Обозначения и единицы измерения.
S – Путь; метр км, см, мм V – Скорость; метр/сек, км/час
![]() а
– Ускорение линейное метр/сек
а
– Ускорение линейное метр/сек![]() ;
t
- Время; сек, часы
;
t
- Время; сек, часы
- Приращения; любые единицы, смотря, что приращивается
d – Дифференциал, это бесконечно малое приращение
g - Ускорение силы тяготения. Для Земли g = 9,8 м/сек
So, Vo, ao, to, – начальные значения пути, скорости, ускорения, времени.
Средние значения.
S = So + V * (t –to) ; V=(S –So)/(t –to); a = ao + V/t;
S
= So+
Vo
* t
+ a
*t![]() /
2
/
2
Если
начальные значения равны нулю: So=0,
Vo=0,
и т.д. То они исключаются из формул и
формулы укорачиваются. Например, для
свободно падающего тела в поле тяготения
с высоты ho:
a =g;
V
= g
*t;
S
= h
= ho
– g
*t![]() /2.
/2.
Общие законы движения
1 Закон. Если на тело не действуют другие тела, оно сохраняет состояние покоя или равномерного прямолинейного движения. Это закон инерции, первый закон Ньютона.
2 Закон. Все движения происходят одинаково в покоящихся системах отсчета, или движущихся относительно друг друга с постоянной скоростью. Это принцип одинаковости или равнозначности инерциальных систем отсчета или принцип независимости Галилея.
3 Закон. Все движения материального тела происходят независимо друг от друга и складываются как векторные величины. Так любое тело на земле одновременно участвует в движении Солнца с планетами вокруг Центра Галактики со скоростью около 200 км./сек, в движении Земли по орбите со скоростью около 30 км/сек, во вращении Земли вокруг своей оси со скоростью до 400 м /сек и возможно в других движениях. Получается весьма замысловатая криволинейная траектория!
Если тело брошено с начальной скоростью Vo, под углом к горизонту то дальность полета –S вычисляется по формуле:
S
= 2 V *SIN()
* COS()
/ g = V
*SIN()
* COS()
/ g = V *SIN(2)
/ g
*SIN(2)
/ g
Максимальная дальность при =45 градусов. Максимальная высота полета –h вычисляется по формуле :
h
= V * SIN()
* SIN()![]() /2g
/2g
Обе эти формулы можно получить, если учесть, что вертикальная составляющая Vo*SIN(), а горизонтальная Vo* COS(), V =g*t, t =V/g.
Cделаем подстановку в основную формулу для высоты
h
= g
t![]() /2
= g* (V/g)
/2
= g* (V/g)![]() /2
= V
/2
= V![]() /2g
= V
/2g
= V * SIN()
* SIN()![]() /2g.
/2g.
Это и есть нужная формула. Максимальная высота при бросании вертикально вверх, при этом
=90
градусов, SIN()
=1; h
= V */2g
*/2g
Для вывода формулы дальности полета нужно горизонтальную составляющую умножить на удвоенное время падения с высоты h. Если учитывать сопротивление воздуха, то путь будет короче. Для снаряда, например, почти вдвое. Одной и той же дальности будут соответствовать два разных угла бросания.
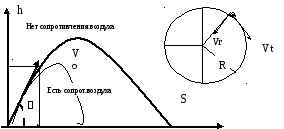
Рис.11 Траектории полета тела брошенного под углом к горизонту. Рисунок справа движение по окружности.
Движение тела по окружности.
- Угловая скорость вращающегося тела; радиан / сек
-Угловое положение вращающегося тела; радианы или градусы относительно оси. Радиан это угол под которым видна из центра окружности дуга равная радиусу окружности, соответственно рад=360/6,28 = 57,32 градусов
а-угловое ускорение измеряется в рад/сек2
= о + * t, Угловое перемещение от о.
S = *R - Линейное преремещение по окружности радиуса R.
=( - о)/(t –to); -Угловая скорость. V = * R – Скорость по окружности
T = 2*/ =2**R/V Отсюда V = 2**R/T
a
=ao
+ /t
–Угловое
ускорение. Угловое ускорение определяется
тагенциальной силой и при ее отсутствии
будет равномерное движение тела по
окружности. При этом на тело действует
центростремительное ускорение, которое
в течение оборота изменяет скорость в
2*
раз. Его величина определиться формулой.
a
=V/T
=2**V/2**R/V
=V![]() /R
/R
Средние величины скорости и ускорения не позволяют рассчитать положение тела при неравномерном движении. Для этого необходимо знать значения скорости и ускорения в короткие промежутки времени или мгновенные значения. Мгновенные значения определяются через производные или дифференциалы.
Дифференциальная форма кинематических формул
V
=lim S
/t
( при
t0)
= dS/dt; a = dV/dt = d![]() S/dt
S/dt![]() ;
;
Интегральная форма для пути и скорости.
S
=![]() V
dt; V =
V
dt; V =![]() a
dt
a
dt
Точно такие же дифференциальные и интегральные формулы для вращательного движения с точностью до обозначений.
Переход к новой системы координат, движущейся по оси Х со скоростью V
|
Преобразование Галилея Х1 = X – V*t Y1 = Y Z1 = Z t1=t |
Преобразование Лоренца X1
= X –V*t / Y1 = Y Z1 = Z t1=t–V/C |
Здесь С – скорость света, С =299792 км/сек в вакууме.
4.3 Динамика, законы Ньютона, как основа механистической картины мира.
Механика основывается на 4-х законах Исаака Ньютона
Первый закон (закон инерции). Если на тело не действуют другие тела то оно сохраняет состояние покоя или равномерного прямолинейного движения.
Второй закон (закон динамики) Ускорение тела –а, прямо пропорционально действующей силе -Fи обратно пропорционально массе тела –m.
Формула : a = F/m, или F = m*a (формула фома).
Третий закон (противодействия сил) Сила действия –F1 равна силе противодействия –F2, обе силы приложены в одной точке и противоположно направлены. F1 = - F2
Четвертый закон (закон всемирного тяготения) Сила притяжения –F двух тел –m1 и m2 равна произведению их масс, умноженную на константу тяготения -G и деленному на квадрат расстояния между телами -r.
Формула: F = G*m1*m2/r2
Кроме этих законов важное значение имеют законы сохранения. В системе нет сторонних сил действующих на ее тела (такая система называется замкнутой) сохраняются масса , энергия и количество движения или импульс (произведение массы тела на скорость)