

ли нейные пространства
.pdfназывается плоскостью в Vn. Размерностью плоскости X называется размерность соответствующего подпространства
L dim X dim L .
Одномерная плоскость пространства Vn называется прямой линией.
Плоскость размерности n 1 называется гиперплоскостью. Две плоскости называются совпадающими, если они состо-
ят из одних и тех же точек (векторов) пространства; в противном случае они называются несовпадающими.
Множество точек n-мерного пространства, принадлежащих как плоскости X1, так и плоскости X2, называется их пересечени-
ем, |
а |
сами плоскости |
X1 |
и |
X2 |
пересекающимися, если |
|
X1 X2 |
0 . |
|
|
|
|
|
|
|
Две несовпадающие плоскости X1 |
L a1 |
и X2 L a2 , по- |
||||
лученные сдвигом одного и того же подпространства L, назы- |
|||||||
ваются параллельными. |
|
|
|
|
|
||
|
Из определения плоскости следует, что всякая плоскость |
||||||
является линейным многообразием. |
|
|
|||||
|
Всякая k-мерная плоскость |
X L a может быть задана |
|||||
либо параметрическим уравнением |
|
|
|||||
|
|
x 1e1 |
2e2 |
... k ek a , |
|
||
где |
x X , e1 , e2 , ..., ek — базис в L, 1 , 2 , ..., k |
— произвольные |
|||||
числа, либо как линейное многообразие системой линейных неоднородных уравнений
a11 x1 a12 x2 ... a1n xn a10 a21 x1 a22 x2 ... a2 n xn a20
...
am1 x1 am 2 x2 ... amn xn am 0
ранга n-k, где x1 , x2 , ..., xn — координаты вектора x X .
В частности, всякая прямая задается либо системой линей-
ных уравнений ранга n 1, либо параметрическим уравнением x e a
21
где e |
— направляющий вектор прямой, λ — параметр. Если x1 |
|||||||
и x2 |
— радиус-векторы двух точек прямой, то можно записать |
|||||||
уравнение прямой, проходящей через две данные точки |
||||||||
|
|
x 1 x1 x2 , |
x X |
|||||
Наконец, в координатной форме можно записать канониче- |
||||||||
ское уравнение прямой |
|
|
|
|
|
|
||
|
|
x1 x10 |
|
x2 x20 |
... |
xn xn0 |
, |
|
|
|
|
|
|
||||
|
|
e1 |
|
e2 |
|
en |
||
где x1 , x2 , ..., xn — координаты точки x X , x10 , x20 , ..., xn 0 — координаты некоторой фиксированной точки прямой; e1 , e2 , ..., en -
координаты направляющего вектора e прямой.
Всякая гиперплоскость задается одним линейным уравнением a1 x1 a2 x2 ... an xn a0
Приме ры
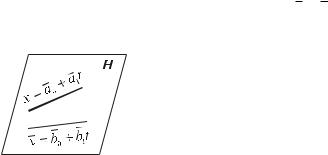
1. Необходимо найти условия, необходимые и достаточные для того, чтобы две прямые x a0 a1t и x b0 b1t пространства Vn n 1 лежали в одной двумерной плоскости.
Предположим вначале, что две данные прямые лежат в одной плоскости с уравнением
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x C |
0 C1 1 C2 2 |
||||||||||||||||||||||||
|
|
|
|
|
где λ1, λ2 — параметры. Тогда при некото- |
||||||||||||||||||||||||||||||
|
|
|
|
|
рых 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
11 , 2 21 , a0 C |
0 C1 11 C2 21 , |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
а при некоторых 1 21 , 2 |
22 , |
b0 C |
0 C1 21 C2 22 . |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Поэтому |
вектор a0 |
b0 |
принадлежит линейной оболочке |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
векторов C1 и C2 . Далее для произвольной точки 1 прямой най- |
|||||||||||||||||||||||||||||||||||
дутся такие λ1 |
и λ2, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
x a0 a1t C |
0 C1 1 C2 2 |
|||||||||||||||||||||||||||||
Значит и |
a1 L c1 ,c2 . Аналогично |
|
L c1 ,c2 . Но всякие |
||||||||||||||||||||||||||||||||
b1 |
|||||||||||||||||||||||||||||||||||
три вектора из двумерного подпространства линейно зависимы. Следовательно, необходимым условием принадлежности пря-
22
мых плоскости является линейная |
зависимость векторов |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a0 |
b0 , a1 , b1 . Обратно, пусть a0 |
|
b0 , a1 , b1 |
линейно зависимы. То- |
|||||||||
|
|
|
|
|
|
||||||||
гда существуют такие λ1 и λ2, |
что a0 |
b0 1a1 2b1 . Поэтому |
|||||||||||
уравнение второй прямой можно переписать в виде
x a0 1a1 2b1 tb1
Очевидно, что теперь оба уравнения содержатся в уравнении плоскости H:
x a0 ta1 b1
где t и τ параметры, и, следовательно, прямые принадлежат плоскости H.
2. Найти необходимые и достаточные условия для того, чтобы две прямые x a0 a1t и b0 b1t x проходили через одну
точку, но не совпадали.
Предположим, что при некоторых значениях параметров t t1 для первой прямой и t t2 для второй прямые пересекают-
ся. Тогда
a0 a1t1 b0 b1t2
Отсюда следует, что векторы a0 b0 , a1 , b1 линейно зависимы. Данное соотношение далее можно при известных a0 , b0 , a1 , b1 рассматривать как систему линейных уравнений (в
координатной форме) на определение t1 и t2. Так как прямые не совпадают, то решение системы
|
|
|
|
a1t1 |
b1t2 a0 b0 |
(4.1) |
|
единственно. Значит ранг матрицы системы равен 2 и векторы a1 , b1 должны быть линейно независимы. Обратно пусть a1 , b1 –
линейно независимы, векторы a0 b0 , a1 , b1 – линейно зависимы.
Тогда система (4.1) имеет и причем единственное решение. Следовательно, прямые пересекаются в единственной точке.
4.3.Задачи
1.Найти точку пересечения двух прямых a0 a1t и b0 b1t .
23

а)
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
||
a0 |
|
1 |
, |
a1 |
|
1 |
, |
|
|
b0 |
2 |
, |
|
b1 |
|
1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
3 |
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
||
|
3 |
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
0 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
|||
a0 |
|
2 , |
|
a1 |
|
1 , |
b0 |
|
|
1 |
, |
b1 |
|
0 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|||
|
|
3 |
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Найти прямую, проходящую через точку, заданную вектором c и пересекающую прямые x a0 a1t и x b0 b1t , и найти точки пересечения искомой прямой с двумя данными
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
0 |
|
|
|
|
2 |
|
|
8 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а) |
a |
0 |
, a |
2 |
, |
|
|
|
1 |
, |
|
|
3 |
, |
c |
9 |
|||||||||
b |
|
b |
|||||||||||||||||||||||
|
0 |
|
2 |
|
1 |
1 |
0 |
|
|
1 |
1 |
|
2 |
|
4 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
5 |
|
|
|
|
|
1 |
|
|
|
|
4 |
|
|
15 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a 1 , |
a |
2 |
|
|
2 |
|
|
|
0 |
|
c |
5 |
|
|||||||||||
б) |
, |
b |
|
, |
b |
, |
|
||||||||||||||||||
|
0 |
1 |
1 |
|
1 |
|
|
0 |
|
|
3 |
|
1 |
|
|
1 |
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
3 |
|
|
7 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Описать все случаи взаимного расположения двух плоскостей
x a0 a1t1 a2t2 , x b0 b1t1 b2t2
24
в n-мерном пространстве и указать необходимые и достаточные условия для каждого из этих случаев.
4.Доказать, что всякая система K 1 точки пространства Vn определяет плоскость размерности r K .
5.Доказать, что линейное многообразие может быть охарактеризовано как множество векторов, содержащее вместе с
любыми двумя векторами x1 и x2 их линейные комбинации
x1 1 x2 при любых α.
6. Найти параметрические уравнения плоскости, заданной общими уравнениями:
а) x1 x2 |
2x3 |
3x4 |
1 |
б) 2x1 x2 x3 2x4 |
3x5 2 |
|
x1 2x2 x3 |
2x4 3 |
6x1 3x2 |
2x3 4x4 5x5 3 |
|||
x1 x2 |
4x3 |
5x4 |
3 |
6x1 3x2 |
4x3 8x4 13x5 9 |
|
|
|
|
|
4x1 2x2 x3 x4 |
2x5 1 |
|
7. Найти общие уравнения плоскости, заданной параметрическими уравнениями в координатной форме
а) x1 2 t1 t2 |
б) x1 1 t1 t2 |
||
x2 |
1 2t1 t2 |
x2 |
2 t2 |
x3 |
3 t1 2t2 |
x3 |
5 t1 3t2 |
x4 |
3 3t1 t2 |
x4 |
3 2t1 t2 |
x5 |
1 t1 3t2 |
x5 |
1 3t1 2t2 |
5. Евклидовы и унитарные пространства
Определение. Вещественная функция x, y двух векторных аргументов x и y , заданная на линейном пространстве E, называется скалярным произведением, если выполняются сле-
дующие условия: |
|
1. x, y y, x |
x, y E |
2.x, y x, y x, y E , – вещ. число
3.x y, z x, z y, z
25

4. x, x 0 x 0 , x, x 0 x 0
Определение. Вещественное линейное пространство E, на котором задано скалярное произведение, называется евклидовым пространством.
При ме р . Рассмотрим арифметическое пространство Rn |
и |
определим скалярное произведение векторов x x1 , x2 ,..., xn |
и |
y y1 , y2 ,..., yn соотношением |
|
x, y x1 y1 x2 y2 ... xn yn |
|
Прямой подстановкой убеждаемся, что условия 1-4 выполняются. Получим n-мерное евклидово пространство, которое обычно обозначается как En.
В случае комплексного линейного пространства скалярное произведение определяется несколько иным образом.
Определение. Комплексная функция x, y двух векторных аргументов x и y , заданная на комплексном линейном про-
странстве U, называется скалярным произведением, если выполняются следующие условия:
1. x, y y, x * x, y U
2.x, y x, y x, y U , — комплексное число
3.x y, z x, z y, z
4. x, x 0 x 0 , x, x 0 x 0
Комплексное линейное пространство U, на котором задано скалярное произведение, называется унитарным пространст-
вом.
Во всяком унитарном (евклидовом) пространстве имеет ме-
сто неравенство Коши-Шварца:
x, y 2 x, x y, y
сравенством лишь в случае, когда y x .
Введение скалярного произведения позволяет распространить на линейные пространства различные метрические понятия:
26

1. Норма (длина) вектора x |
определяется как |
|||
|
|
|
|
|
|
x |
|
x, x |
|
Введенная функция удовлетворяет следующим условиям
1. 
 x
x 
 0 x 0 ,
0 x 0 , 
 x
x 
 0 x 0
0 x 0
2.
 x
x 


 x
x 

3.
 x y
x y 


 x
x 


 y
y 

2. Угол φ между векторами x и y евклидова пространства
определяется как угол, изменяющийся в пределах от нуля до π, косинус которого
cos x, y
x y
3. Расстояние между точками аффинного пространства x и
y, связанного с данным евклидовым, определяется как
x, y 
 x y
x y 

5.1.Ортонормированный базис евклидова и унитарного
пространств
Определение. Вектор x называется нормированным, если 
 x
x 
 1.
1.
Определение. Два вектора x и y называются ортогональными, если x, y 0 .
Определение. Система векторов e1 , e2 , ..., en евклидова
(унитарного) пространства называется ортогональной, если она либо состоит из одного ненулевого вектора, либо ее векторы попарно ортогональны. Ортогональная система, состоящая из нормированных векторов, называется ортонормированной. Для нее
ei |
1, |
i j |
, ej |
i j |
|
|
0, |
Всякая ортогональная система линейно независима.
27
Определение. Базис евклидова (унитарного) пространства, векторы которого e1 , e2 , ..., en образуют ортонормированную сис-
тему, называется ортонормированным базисом.
Заметьте себе, что, в зависимости от того, как введено скалярное произведение, различные системы векторов могут быть или не быть ортонормированными.
Процедура ортогонализации Грама-Шмидта. Для по-
строения ортонормированной системы векторов и, в частности, ортонормированного базиса e1 , e2 , ..., en может быть использова-
на следующая процедура. Пусть векторы f1 , f2 , ..., fn — линейно независимы. Первый вектор ортонормированной системы
e1 f1 f1
Второй вектор
|
|
f2 |
, f2 |
|
|
|
|
|
e2 |
f2 f2 ,e1 e1 |
|||||||
f2 |
||||||||
|
|
|
|
|
|
|
||
Наконец, векторы ek k 3, n определяются соотношениями
ek |
fk |
, |
fk |
fk |
fk ,ei ei |
|||
|
|
|
|
|
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
i 1 |
|
|
k |
|
|
|
|
|
|
Пример . Необходимо ортогонализировать систему векто-
ров
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
||
|
f |
, f |
|
|
, |
f |
|
|
||||||||||
1 |
|
2 |
|
|
2 |
|
5 |
|
3 |
|
|
8 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
3 |
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скалярное произведение |
|
векторов |
x x1 ,..., x4 |
и |
||||||||||||||
y y1 ,..., y4 определяется как
4
x, y xi yi
i 1
28

|
|
|
|
|
|
|
Для |
|
|
построения |
|
|
|
первого |
|
вектора |
e1 |
считаем |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
f |
|
|
12 |
22 22 12 |
|
10 . Вектор |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e1 |
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для |
построения |
второго |
|
|
|
|
вектора |
|
вычислим |
вначале |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
f2 , e1 10 . Вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
10 |
|
|
2 |
|
|
3 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
2 |
5 |
|
|
|
|
|
|
|
|
2 |
3 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для построения третьего вектора вычислим |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
f3 , e1 3 10 и |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
f3 ,e2 26 . Вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
2 |
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
2 |
|
|
|
|
3 |
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
3 |
|
|
8 |
|
|
|
3 |
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
И вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e3 |
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29
Во всяком ортонормированном базисе e1 , e2 , ..., en унитарного (евклидова) пространства скалярное произведение векторов x и y с координатами x1 , x2 , ..., xn и y1 , y2 , ..., yn
n
x, y xi yi
i 1
Координаты вектора x
xi x,ei
5.2. Ортогональное дополнение
Определение. Два множества F и G векторов евклидова пространства E называются ортогональными, если каждый вектор из F ортогонален каждому вектору из G.
Определение. Пусть F – подпространство E. Совокупность всех векторов подпространства E, ортогональных подпространству F, называется ортогональным дополнением F подпространства F.
Всякое ортогональное дополнение F является, в свою очередь, линейным подпространством.
Всякое произвольное евклидово пространство E разлагается в прямую сумму своего произвольного подпространства F и его ортогонального дополнения F
E F F
При ме ры
1. Требуется найти базис ортогонального дополнения L подпространства L, натянутого на векторы
|
|
1 |
|
|
|
5 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
a |
1 |
, |
a |
8 |
, |
a 9 |
||||
1 |
|
1 |
|
2 |
|
2 |
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
3 |
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
Будем считать, что базис, относительно которого заданы
векторы, ортонормированный. По определению, если |
x L , то |
||||||
x a a |
a . |
Далее, каждый вектор y из L |
должен |
||||
1 |
1 |
2 |
2 |
3 |
3 |
|
|
быть ортогонален к |
x . Для этого достаточно, чтобы y, ai 0 |
||||||
30