

4 Класс – свежевспаханное поле, поле под посев; Билет-16
1) Последовательность установления оптимального состава и режимов работы пахотных и широзахватных агрегатов?
Оптимальный
состав пахотных агрегатов по максимуму
чистой часовой производительности
![]() га/см,т.к. с изменением количества
корпусов плуга То не меняется или
максимум сменной производительности
достигается на той же передаче, что иWчас.
га/см,т.к. с изменением количества
корпусов плуга То не меняется или
максимум сменной производительности
достигается на той же передаче, что иWчас.
Оптимальный состав широкозахватных агрегатов выбирают по максимуму сменной производительности,т.к. с увеличением количества машин-орудий в агрегате То-уменьшается из-за:
-увеличения времени ЕТО машин-орудий(на тех операциях, где нет вспомогательных рабочих и следовательно увеличено время ЕТО);
-из-за увеличения времени внутрисменных переездов с участка на участок(с подготовкой переезда,самого переезда,подготовки после переезда);
-увеличение
времени поворотов и заездов агрегата.
После определения количества
машин-орудий(корпусов плуга) на всех
принятых к рассмотрению передачах
вычисляется сопротивление агрегата(плуга)
при на уклон
![]() ,(
,(![]() ),
и под уклон
),
и под уклон![]() ,(
,(![]() ):
):
![]()
![]()
![]()
![]()
c-коэф-нт
учитывающий вес земли на корпусах плуга.
Затем по величине
![]() ,(
,(![]() )
определяют наивысшие передачи трактора,
на которых возможно движение под уклон
для каждого рассматриваемого состава
агрегата или корпусов плуга ,причем
рассматриваемая скорость не должна
выходить за диапазон рабочих скоростей
машин-орудий или плуга
)
определяют наивысшие передачи трактора,
на которых возможно движение под уклон
для каждого рассматриваемого состава
агрегата или корпусов плуга ,причем
рассматриваемая скорость не должна
выходить за диапазон рабочих скоростей
машин-орудий или плуга
Коэф-нт
использования номинального крюкового
усилия:![]()
 -коэф-нт
допустимого использования номинального
крюкового усилия трактора.
-коэф-нт
допустимого использования номинального
крюкового усилия трактора.
Затем определяют скорость для каждого рассматриваемого состава(корпусов плуга) при движении на уклон и под уклон. Затем вычисляют средневзвешанную скорость:
 далее
определяется сменная производительность
для каждого агрегата:
далее
определяется сменная производительность
для каждого агрегата:
![]() для
пахотных агрегатов формула записана
выше.
для
пахотных агрегатов формула записана
выше.
2) Определение удельного сопротивления машин-орудий при данном скоростном режиме?
![]() ,
Vo-принимаем
=5 км/ч ( по данным испытания трактора
Т-54).
,
Vo-принимаем
=5 км/ч ( по данным испытания трактора
Т-54).
Билет-27
Опред. годовой потребности в ДТ.
Эту потребность м-о рассчитать с использованием технологических карт возделыв-я культур
 [м3]
[м3]
Qi- (кг/га), (л/га) или кг/т км,
Fi- в га или т*км
Можно определить также по укрупненным нормативам
![]() [м3]
[м3]
∑U-планируемый объём тракторных работ в хоз-ве, в га у.п.
Qга у.п. –норма расхода топлива на га у.п. в условиях данного хозяйства
Q/т –потребность в топливе на полевые мех-е работы
С учётом расхода топлива на ТО и ремонт и обкатку машин годовая потребность в ДТ составит
Qт= Q /т+∆Q
∆Q-расход топл. на ТО, ремонт и обкатку машин по нормативам.
Уровень мех-ии производственных операции и пр-го процесса.
Уровень
механизации работ вычисляется по
ф-ле: ![]() %
%
Uмех и Uоб-объём работ вып. Механизировано и общий объём.
Когда определяется уровень мех-ии производственной операции, то объём р-т подставляется в физ.га.
Когда определяется уровень механизации производственного процесса, например возд-я картофеля в целом то объём работ подставляют в га.усл.пахоты.
Билет-17
1)Последовательность установления оптимального состава и режимов работы широкозахватных агрегатов
Состав агрегата:1. на всех принятых к рассмотрению передачах опред-т максимально возможную ширину захвата агрегата:

2.определяют кол-во машин-орудий:
![]() полученное
число округляем в меньшую сторону
полученное
число округляем в меньшую сторону
![]() полученное
число округляем в меньшую сторону
полученное
число округляем в меньшую сторону
Если
N1>=2
то подбирают сцепку, предварительно
определив ее фронт А, т.е. расстояние
м/у местами крепления крайних машин:
![]() ,
м
,
м
Режимы работы: 1. определяют сопр-е агрегата при движении на уклон и под уклон:
На
уклон![]()
Под
уклон![]()
2.затем по величине Ra// определяют наивысшие передачи трактора на к/х возможно движ под уклон для каждого рассматриваемого состава агрегата
3.затем опред-т скорость движения для каждого рассматриваемого состава агрегата при движ. на уклон и под уклон по тяговой хар-ке трактора:
Vp/ определяют при Ркр=Ra/+GT*i
Vp// определяют при Ркр=Ra//-GT*i
4.затем определяют средневзвешенную скорость:
5.далее опред. сменную производительность для каждого рассматр-го агрегата:
![]()
6.оптимальный состав широкозахватных агрегатов выбирают по максимуму сменной производительности.
2)Теоретическая и рабочая скорость движ. агрегата
Теоретич. скорость-это скорость прямолинейного движения агрегата по ровной поверхности без буксования движителей при заданном режиме работы двигателя
![]() м\с
где
rk-радиус
колеса или звездочки трактора,
nд-частота
вращ. Коленвала,
iT-передаточное
число трансмиссии
м\с
где
rk-радиус
колеса или звездочки трактора,
nд-частота
вращ. Коленвала,
iT-передаточное
число трансмиссии
Рабочая скорость движения агрегата меньше теоретической из-за буксования движителей:
![]() м\с
где
б-буксование движителей:
м\с
где
б-буксование движителей:
![]() где
nраб,nх-число
оборотов вед. звездочки или вед. колеса
при прохождении одного и того же участка
с нагрузкой на крюке и вхолостую.
где
nраб,nх-число
оборотов вед. звездочки или вед. колеса
при прохождении одного и того же участка
с нагрузкой на крюке и вхолостую.
Билет-18
1)Определение показателей загрузки трактора
1)
Действительное значение коэф-та
использования номин.крюкового усилии
![]()
Для
обеспечения работоспособности должно
соблюдаться условие:![]()
2) Коэффициент использования крюковой мощности трактора:
![]() NKP=Ra*VP
NKPmax=PKPH*VPH
NKP=Ra*VP
NKPmax=PKPH*VPH
![]()

![]() т.к.
VP>VPH
т.к.
VP>VPH
3)
Тяговый КПД трактора:
![]()
![]()
где
Рд
– движущая сила:
Рд=Ra+fт*GT*cos![]()
![]() GT*i
GT*i
![]() КПД,
учитывающий буксование движителей:
КПД,
учитывающий буксование движителей:
![]()
4)
Коэффициент загрузки двигателя:
![]()
2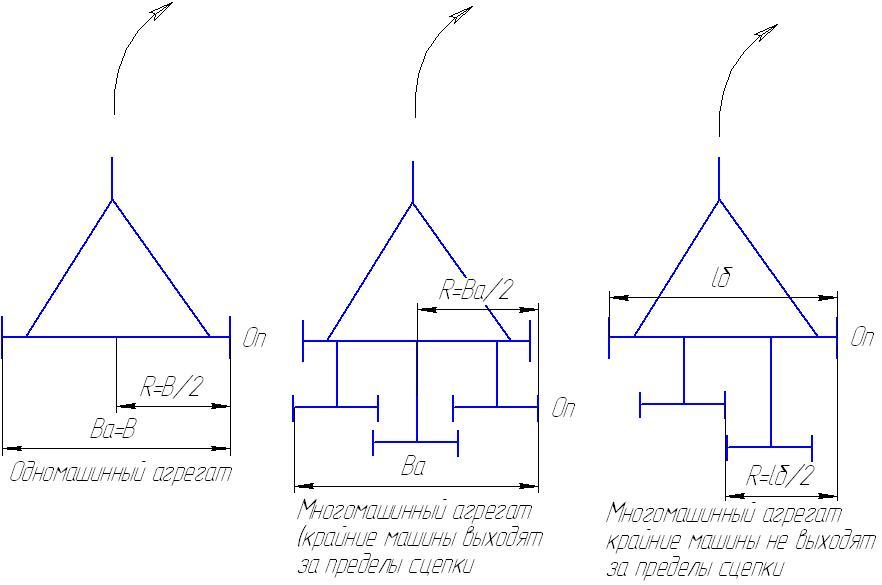 )Виды
поворотов и их длина
)Виды
поворотов и их длина
Различают повороты на 90 и 180 град. На 90 град повороты совершаются при круговом и диагонально-перекрестном способе движения. На 180 град при гоновых и диагонально односледном способе движения.
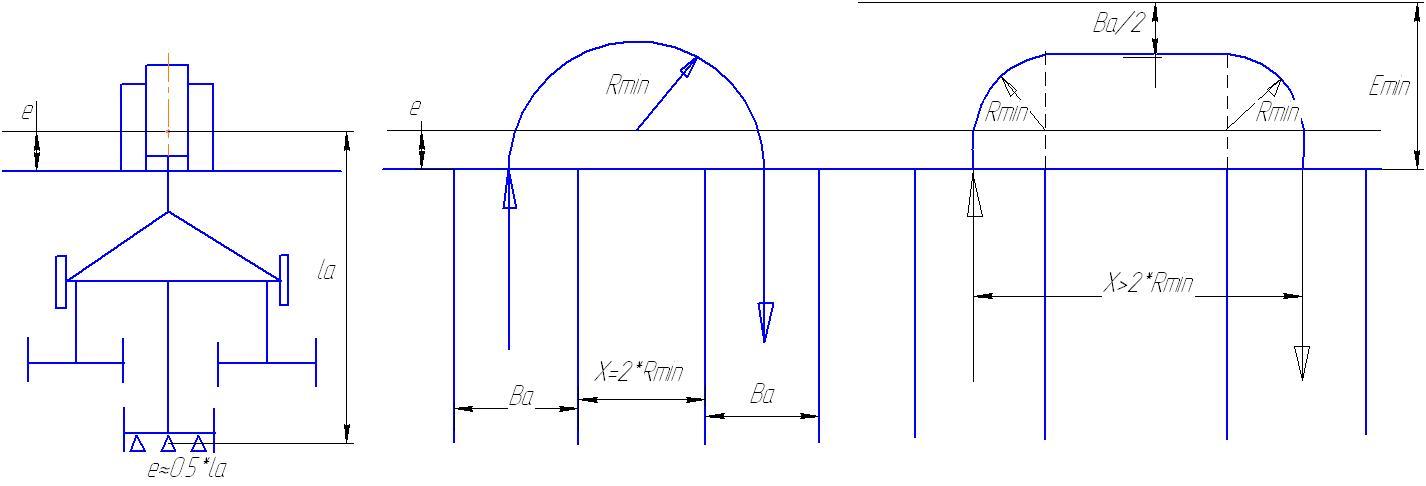
Повороты на 180 град бывают петлевые и беспетлевые
Петлевые совершаются тогда, когда расстояние м/у серединами 2х смежных заездов агрегата меньше 2Rmin.
Д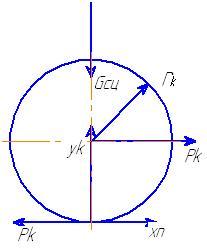 лоя
исключения огрехов при завершении гона
центр агрегата долж.быть вынесен на
расстояние е от линии 1-1.
лоя
исключения огрехов при завершении гона
центр агрегата долж.быть вынесен на
расстояние е от линии 1-1.
П ри
Х>=2*Rmin
совершаются беспетлевые повороты.
ри
Х>=2*Rmin
совершаются беспетлевые повороты.
Длина поворотов равна
Для петлевого
грушевидного:
![]()
Поворот
по полуокружности:
![]()
Поворот
с пробегом по прямой:![]()
Билет-20
1) Центр движения трактора, кинематический центр, радиус поворота агрегата с навесными и прицепными машинами?
При повороте каждая точка трактора описывает свою траекторию. О повороте трактора судят по траектории центра его движения. За центр движения трактора принимается точка О.
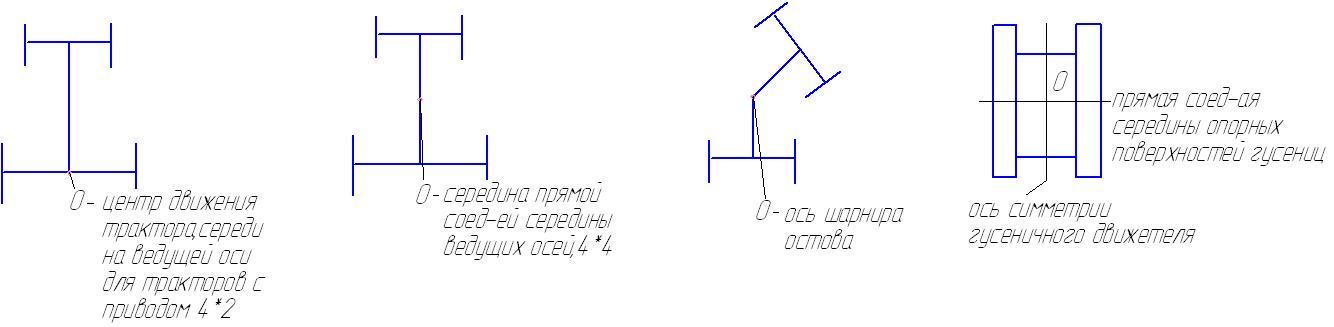
Зная траекторию центра движения трактора при правильном повороте можно определить траекторию любой точки агрегата, поэтому центр движения трактора принимается за кинематический центр агрегата(центр агрегата).
П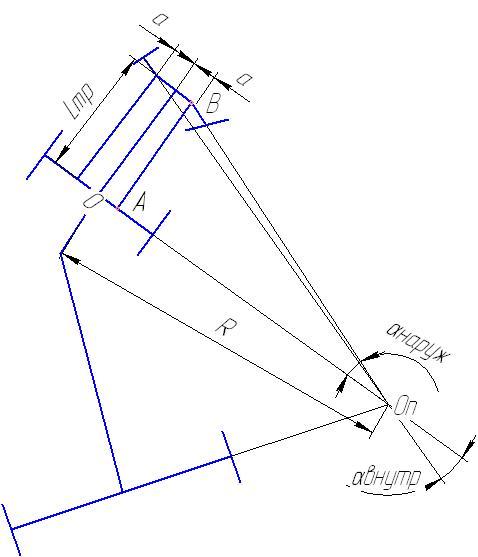 оворот
агрегата происходит относительно центра
поворота Оп.
оворот
агрегата происходит относительно центра
поворота Оп.
Rп=ОА+АОп=а+Lтр*ctgαвнутр
При
![]() получим
минимальный конструктивный радиус
поворота трактора,т.е.
получим
минимальный конструктивный радиус
поворота трактора,т.е.
![]() для
агрегатов с навесными и полунавесными
машинами, с
для
агрегатов с навесными и полунавесными
машинами, с
 конструктивному
радиусу поворота.
конструктивному
радиусу поворота.
Rmin>B/2,Ba/2,Lб/2,для того, что не произошол изгиб изгиб колеса.
Для широкозахватных лущильников, бороновальных агрегатов принимают Rmin≈Ba.
На посеве,культивации,прикатывании принимают: Rmin≈1.7Ba(1.7B)-для 1-машинных агрегатов; Rmin≈1.2Ba(2.4B)-для 2-машинных агрегатов; Rmin≈0.9Ba(2.7B)-для 3-машинных агрегатов; Rmin≈0.8Ba(3.2-4B)-для 4и5-машинных агрегатов.
2)Касательная сила тяги, условия нормального сцепления движетелей с почвой?
Рк приложенная в месте контакта движетеля с почвой уравновешивается реакцией поверхности Хп,а Рк приложенная в центре колеса является движущей агрегат силой или касательной силой тяги Рк.
Максимальная
касательная сила тяги, которая м.б.
реализована движетелем =:
![]() ;
;![]() -коэф-нт
пропорциональности или коэф-нт сцепления.
В соответствии с вышеуказанным
выражением,для того, чтобы буксование
не вышло за пределы допустимого
соблюдается условие Рк≤Ркмах или
Рк≤µ*Gсц=Fсц.
-коэф-нт
пропорциональности или коэф-нт сцепления.
В соответствии с вышеуказанным
выражением,для того, чтобы буксование
не вышло за пределы допустимого
соблюдается условие Рк≤Ркмах или
Рк≤µ*Gсц=Fсц.