

1.18.Пространственная система сходящихся сил.
Условие равновесия пространственной системы сходящихся сил определяется тремя уравнениями:
![]() ;
;
![]() ;
;![]() .
(18.1)
.
(18.1)
Пример №9. Определить
усилия в шести стержнях, соединенных
своими концами шарнирно друг с другом
и с неподвижными опорами. В узлах К
и М
приложены силы
![]() и
и![]() ,
составляющие с положительным направлением
координатных осей углы, равные
соответственно
,
составляющие с положительным направлением
координатных осей углы, равные
соответственно![]() ,
,![]() ,
,![]() для силы
для силы![]() и
и![]() ,
,![]() ,
,![]() для силы
для силы![]() .
Взаимное расположение стержней в
конструкции определяется углами
.
Взаимное расположение стержней в
конструкции определяется углами![]() и
и![]() (рис.45).
(рис.45).
Р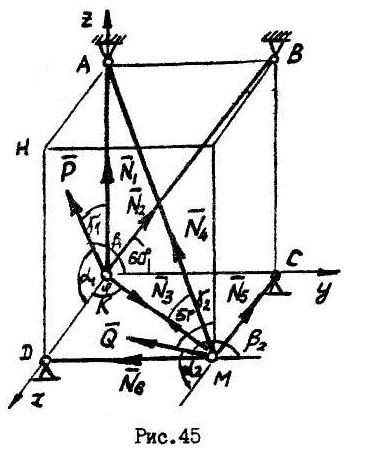 ешение:
ешение:
Так как для системы
сходящихся сил можно составить три
уравнения равновесия, расчет начинаем
с узла К,
в котором сходятся стержни 1,2,3. Предполагаем
все стержни растянутыми. Растягивающие
усилия в стержнях
![]() ,
,![]() и
и![]() направлены от узлаК.
Составим три уравнения равновесия:
направлены от узлаК.
Составим три уравнения равновесия:
![]()
![]() (1)
(1)
![]()
![]() (2)
(2)
![]()
![]() (3)
(3)
из (1):
![]()
из (2):
![]()
из (3):
![]()
Рассмотрим
равновесие узла
![]() .
Усилия
.
Усилия![]() и
и![]() равны по модулю и противоположны по
направлению. Усилие
равны по модулю и противоположны по
направлению. Усилие![]() составляет с плоскостью
составляет с плоскостью![]() угол
угол![]() .
Для нахождения проекции усилия
.
Для нахождения проекции усилия![]() на координатные оси, необходимо
предварительно найти проекцию на
плоскость
на координатные оси, необходимо
предварительно найти проекцию на
плоскость![]() ,
а затем составляющие этой проекции на
каждой из координатных осей. Составим
три уравнения равновесия для системы
сходящихся сил, приложенных к узлу
,
а затем составляющие этой проекции на
каждой из координатных осей. Составим
три уравнения равновесия для системы
сходящихся сил, приложенных к узлу![]() :
:
![]()
![]() (4)
(4)
![]()
![]() (5)
(5)
![]()
![]() (6)
(6)
из (6):
![]()
из (4):
![]()
из (5):
![]()
Знаки показывают, что стержни 1,3,4 – сжаты, а 2,5,6 – растянуты.
1.19. Равновесие произвольной пространственной системы сил.
Для равновесия произвольной системы сил, приложенных к твердому телу, необходимо и достаточно соблюдения следующих условий:
![]() ;
;
![]() ;
;![]()
![]() ;
;
![]() ;
;![]() .
(19.1)
.
(19.1)
Следовательно,
число неизвестных не должно превышать
числа возможных уравнений равновесия.
В некоторых случаях число возможных
уравнений равновесия может быть
уменьшено. Так, если все силы, приложенные
к твердому телу, лежат в плоскости
![]() ,
то уравнения проекций этих сил на ось
,
то уравнения проекций этих сил на ось![]() обращаются в тождество, и число уравнений
равновесия сокращается до пяти.
обращаются в тождество, и число уравнений
равновесия сокращается до пяти.
Пример №10.
Однородная
прямоугольная плита весом
![]() со сторонами
со сторонами![]() и
и![]() закреплена в точке
закреплена в точке![]() сферическим шарниром, в точке
сферическим шарниром, в точке![]() цилиндрическим шарниром и удерживается
в равновесии невесомым стержнем
цилиндрическим шарниром и удерживается
в равновесии невесомым стержнем![]() (рис.46). На плиту действует пара сил с
моментом
(рис.46). На плиту действует пара сил с
моментом![]() и силы
и силы![]() и
и![]() .
Сила
.
Сила![]() лежит в плоскости
лежит в плоскости![]() и составляет с осью
и составляет с осью![]() угол
угол![]() ,
сила
,
сила![]() лежит в плоскости
лежит в плоскости![]() и составляет с осью
и составляет с осью![]() угол
угол![]() .
.
Определить реакции
связей при
![]() ,
,![]() ,
,![]() .
.
Р ешение:
ешение:
На плиту действуют
активные силы
![]() ,
,![]() ,
,![]() ,
пара сил с моментом
,
пара сил с моментом![]() ,
а также реакции связей. Реакцию
сферического шарнира
,
а также реакции связей. Реакцию
сферического шарнира![]() разложим на три составляющие
разложим на три составляющие![]() ,
,![]() ,
,![]() ,
цилиндрического шарнира
,
цилиндрического шарнира![]() (подшипника) – на две составляющие
(подшипника) – на две составляющие![]() и
и![]() ,
реакцию
,
реакцию![]() невесомого стержня направим вдоль
стержня, предполагая, что он растянут.
Для определения шести неизвестных
реакций связей составим шесть уравнений
равновесия действующих на плиту сил:
невесомого стержня направим вдоль
стержня, предполагая, что он растянут.
Для определения шести неизвестных
реакций связей составим шесть уравнений
равновесия действующих на плиту сил:
![]()
![]() (1)
(1)
![]()
![]() (2)
(2)
![]()
![]() (3)
(3)
![]()
![]() (4)
(4)
![]() (5)
(5)
![]()
![]()
![]() (6)
(6)
Для определения
момента силы
![]() относительно координатных осей,
раскладываем силу
относительно координатных осей,
раскладываем силу![]() на две составляющие
на две составляющие![]() и
и![]() ,
численно равные проекциям этой силы на
осиZ
и X
соответственно:
,
численно равные проекциям этой силы на
осиZ
и X
соответственно:
![]() ,
,![]() .
.
Решая систему уравнений (1)-(6), находим искомые величины:
из (5):
![]()
из (6):
![]()
из (1):
![]()
из (2):
![]()
из (4):
![]()
из (3):
![]()
Для проверки можно
составить уравнение моментов относительно
оси
![]() ,
проведенной через точку
,
проведенной через точку![]() :
:
![]()
Реакции связей, значения которых получены отрицательными, имеют направления, противоположное показанному на чертеже.
Пример №11.
На косозубое колесо
вала редуктора диаметром
![]() действует осевая сила
действует осевая сила![]() ,
радиальная
,
радиальная![]() и неизвестное окружное усилие
и неизвестное окружное усилие![]() .
На прямозубое колесо диаметром
.
На прямозубое колесо диаметром![]() ,
закрепленное на том же валу, действует
радиальная сила
,
закрепленное на том же валу, действует
радиальная сила![]() (рис. 47).
(рис. 47).
Определить реакции
подшипников при следующих размерах:
![]() ;
;![]() ;
;![]() .
.

Решение:
Опорой горизонтального
вала в точке
![]() является радиальный подшипник, его
реакцию раскладываем на две составляющие
является радиальный подшипник, его
реакцию раскладываем на две составляющие![]() и
и![]() .
В точке
.
В точке![]() -
радиально-упорный подшипник. Его реакцию
раскладываем на три составляющие
-
радиально-упорный подшипник. Его реакцию
раскладываем на три составляющие![]() ,
,![]() ,
,![]() .
Шестой неизвестной величиной является
окружное усилие
.
Шестой неизвестной величиной является
окружное усилие![]() .
Составим для вала шесть уравнений
равновесия:
.
Составим для вала шесть уравнений
равновесия:
![]()
![]() (1)
(1)
![]()
![]() (2)
(2)
![]()
![]() (3)
(3)
![]()
![]() (4)
(4)
![]()
![]() (5)
(5)
![]()
![]() (6)
(6)
Решая систему уравнений (1)-(6), находим неизвестные величины:
из (2):
![]()
из (5):

из (6):
![]()
из (1):
![]()
из (4):
![]()
из (3):
![]()