

2.7. Механические передачи.
Передача движения от одной машины к другой или внутри машины от одного ее вала к другому осуществляется разнообразными механизмами, называемыми механическими передачами. Передача движения может осуществляться:
а) гибкой связью (ременные, цепные передачи);
б) непосредственным контактом (фрикционные, зубчатые передачи).
Валы и шкивы, от которых передается движение, называются ведущими, воспринимают движение ведомые валы и шкивы.
Ременная передача между параллельными валами шкет быть открытой (рис.74,а) или перекрестной (рис.74,б). Перекрестная передача позволяет изменить направление вращения.

При отсутствии проскальзывания все точки ремня движутся с одинаковой скоростью:
![]() ,
,
откуда можно получить соотношение между кинематическими характеристиками и размерами вращающихся звеньев:
![]() .
.
Фрикционными называются устройства, передача вращательного движения в которых осуществляется за счет трения. Передача вращения между параллельными валами может осуществляться цилиндрическими колесами (рис.75,а), а между валами с пересекающими осями (рис.75,б) - коническими колесами. Кинематические характеристики и размеры фрикционных колес связаны между собой соотношением:
![]() .
(2.37)
.
(2.37)

С
помощью
вариатора
(рис.75,в)
можно
путем
перемещения
колеса
![]() вдоль
диаметра
колеса
вдоль
диаметра
колеса
![]() получить
переменное
соотношение
между
кинематическими
характеристиками
и
размерами
звеньев:
получить
переменное
соотношение
между
кинематическими
характеристиками
и
размерами
звеньев:
![]() (2.38)
(2.38)
где
![]() -переменное
расстояние
средней
плоскости
колеса
-переменное
расстояние
средней
плоскости
колеса
![]() от
от
оси
колеса
![]() ;
;
![]() -
радиус
колеса
-
радиус
колеса
![]() .
.
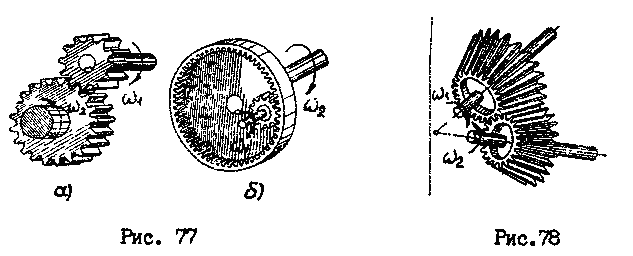
Зубчатые
передачи
являются
одними
из
самых
распространенных
типов
передаточных
механизмов
(рис.76,77,78,79).
Скорость
точки
![]() можно
выразить
через
угловые
скорости
и
размеры
колес:
можно
выразить
через
угловые
скорости
и
размеры
колес:
![]() .
.

Так
как число зубьев пропорционально размеру
колес, можно получить следующие
соотношения:
![]() . (2.39)
. (2.39)
При внешнем зацеплении (рис.77,а) колеса вращаются в противоположных направлениях, при внутреннем зацеплении (рис.77,б) -направление вращения совпадает. Конические зубчатые колеса (рис.78) служат для передачи вращения между пересекающимися валами.
Для преобразования вращательного движения в поступательное применяют реечное зацепление (рис,79).
С корость
поступательно движущейся
рейки
равна скорости точки контакта и может
быть определена по формуле:
корость
поступательно движущейся
рейки
равна скорости точки контакта и может
быть определена по формуле:
![]()
Многоступенчатой
передачей называется механизм,
содержащий ряд простых передач (рис.
80). Для всей передачи от ведущего вала
![]() и валу
и валу![]() можно установить следующие соотношения:
можно установить следующие соотношения:
![]() (2.30)
(2.30)

Пример № 7.
Дисковая
пила
![]() (рис.81)
диаметром
(рис.81)
диаметром
![]() приводится
в
движение
от
электродвигателя
ременной
передачей,
шкивы
которой
имеют
размеры
приводится
в
движение
от
электродвигателя
ременной
передачей,
шкивы
которой
имеют
размеры
![]() и
и![]() .С
какой
угловой
скоростью
должен
вращаться
шкив
электродвигателя,
чтобы
скорость
зубьев
пилы
не
превышала
.С
какой
угловой
скоростью
должен
вращаться
шкив
электродвигателя,
чтобы
скорость
зубьев
пилы
не
превышала
![]() ?
?
1 .Линейная
скорость
.Линейная
скорость
![]() зубьев
пилы
пропорциональна
угловой
скорости
пилы
и
шкива
зубьев
пилы
пропорциональна
угловой
скорости
пилы
и
шкива
![]() :
:
![]() ,
,
откуда
![]() .
.
Шкив
![]() насажен
на
один
вал
с
пилой,
следовательно,
угловая
скорость
насажен
на
один
вал
с
пилой,
следовательно,
угловая
скорость
![]() шкива
шкива
![]() равна
равна
![]() .
.
2. Шкивы
![]() и
и
![]() соединены
бесконечным
ремнем.
Выразим
соотношение
между
угловыми
скоростями
шкивов
и
их
размерами:
соединены
бесконечным
ремнем.
Выразим
соотношение
между
угловыми
скоростями
шкивов
и
их
размерами:
![]() , откуда
, откуда
![]() ,
,
что соответствует частоте вращения:
![]() .
.
ПРЕОБРАЗОВАНИЕ ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА В МЕХАНИЗМАХ.
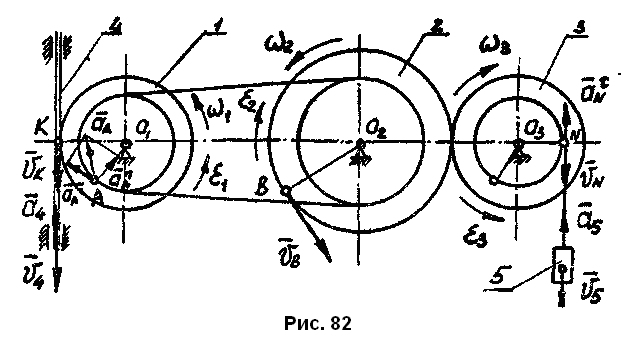
Пример №8.
Механизм
состоит
из
ступенчатых
колес
![]() и
и
![]() ,связанных
ременной
передачей,
колеса
,связанных
ременной
передачей,
колеса
![]() и
и
![]() находятся
в
зацеплении,
колесо
находятся
в
зацеплении,
колесо
![]() находится
в
зацеплении
с
зубчатой
рейкой
находится
в
зацеплении
с
зубчатой
рейкой
![]() ,груз
,груз
![]() находится
на
конце
нити,
намотанной
на
шкив
радиуса
находится
на
конце
нити,
намотанной
на
шкив
радиуса
![]() (рис.
82). Определить
скорости
точек
(рис.
82). Определить
скорости
точек
![]() и
и
![]() , ускорение
груза
, ускорение
груза
![]() ,ускорение
точки
,ускорение
точки
![]() и
угловое
ускорение
колеса
и
угловое
ускорение
колеса
![]() в
момент
времени
в
момент
времени
![]() ,если
задан
закон
движения
рейки
,если
задан
закон
движения
рейки
![]() и размерыколес:
и размерыколес:
![]() ,
,
![]() ,
,![]() ,
,![]() ,
,
![]() ,
,
![]() .
.
Решение:
1. Рейка
![]() совершает поступательное движение по
закону
совершает поступательное движение по
закону
![]() .
Определим скорость движения рейки:
.
Определим скорость движения рейки:
![]() .
При
.
При
![]() ,
,![]() .
.
Ускорение
рейки:
![]() .
.
Знак минус указывает, что рейка движется замедленно.
2. Точка
![]() ,
лежащая на ободе колеса
,
лежащая на ободе колеса![]() ,
движется со скоростью, равной скорости
рейки, находящейся в зацеплении с
колесом, т.е.
,
движется со скоростью, равной скорости
рейки, находящейся в зацеплении с
колесом, т.е.
![]() .
.
Учитывая, что
![]() ,
можно выразить угловую скорость колеса
,
можно выразить угловую скорость колеса![]() :
:
![]() .
.
Угловое ускорение
колеса
![]() :
:
![]() .
.
Колеса радиусов
![]() и
и![]() находятся на одном валу. Определим
ускорение точки
находятся на одном валу. Определим
ускорение точки![]() :
:
![]() ,
,
где
![]() ,
,![]() ,
,![]()
3. Колеса радиусов
![]() и
и![]() связаны бесконечным ремнем, поэтому
скорости всех точек ремня одинаковы,
т.е.
связаны бесконечным ремнем, поэтому
скорости всех точек ремня одинаковы,
т.е.![]() ,
угловые скорости и угловые ускорения
валов
,
угловые скорости и угловые ускорения
валов![]() и
и![]() обратно пропорциональны
обратно пропорциональны
размерам колес:
![]() ;
;![]() ;
;
![]() ;
;![]() .
.
Скорость точки
![]() ,
лежащей на ободе колеса
,
лежащей на ободе колеса![]() :
:
![]() .
.
4. Колеса радиусов
![]() и
и![]() находятся в жестком зацеплении друг с
другом, поэтому
находятся в жестком зацеплении друг с
другом, поэтому
![]() ;
;![]() ;
;
![]() ;
;![]() .
.
Скорость точки
![]() ,
лежащей на ободе колеса
,
лежащей на ободе колеса![]() радиуса
радиуса![]() :
:
![]() .
.
5. Ускорение груза
![]() равно касательному ускорению точки
равно касательному ускорению точки![]() :
:
![]() .
.
Для заданного
момента времени
![]() :
:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.