

2.8. Плоскопараллельное движение твердого тела.
Плоскопараллельным (или просто плоским) называется такое движение твердого тела, при котором все его точки перемещаются в плоскостях, параллельных какой-то неподвижной плоскости. Плоское движение совершают многие звенья механизмов и машин, катящееся колесо.
Ч астным
случаем
такого
движения
является
вращение
тела
вокруг
неподвижной
оси.
Все
звенья
кривошипно-ползунного
механизма
(рис.83),
состоящего
из
кривошипа
астным
случаем
такого
движения
является
вращение
тела
вокруг
неподвижной
оси.
Все
звенья
кривошипно-ползунного
механизма
(рис.83),
состоящего
из
кривошипа
![]() ,ползуна
,ползуна
![]() и
шарнирно
соединенного
с
ним
шатуна
и
шарнирно
соединенного
с
ним
шатуна
![]() ,
совершают
плоское
движение,
так
как
все
звенья
движутся
параллельно
некоторой
неподвижной
плоскости
(плоскости
чертежа).
Одновременно
движение
кривошипа
,
совершают
плоское
движение,
так
как
все
звенья
движутся
параллельно
некоторой
неподвижной
плоскости
(плоскости
чертежа).
Одновременно
движение
кривошипа
![]() является вращательным, движение ползуна
является вращательным, движение ползуна
![]() -
поступательным. Все точки колеса (рис.
84) движутся в плоскостях, параллельных
неподвижной вертикальной плоскости.
При движении по закруглению движение
колеса не будет плоским.
-
поступательным. Все точки колеса (рис.
84) движутся в плоскостях, параллельных
неподвижной вертикальной плоскости.
При движении по закруглению движение
колеса не будет плоским.

Плоскопараллельное движение твердого тела является составным, оно складывается из поступательного движения вместе с какой-либо точкой, принятой за полюс, и вращения вокруг оси, проходящей через эту точку (рис.85). Поэтому плоское движение твердого тела описывается тремя уравнениями:

![]()

![]() (2.31)
(2.31)
![]()
За
полюс обычно принимают точку, скорость
которой известна или ее легко можно
вычислить. Например, движение
колеса (рис.87)
складывается
из
поступательного
движения вместе с полюсом-центром
колеса
![]() и
вращения
с угловой скоростью
и
вращения
с угловой скоростью
![]() вокруг оси, проходящей через полюс.
Скорость любой точки
вокруг оси, проходящей через полюс.
Скорость любой точки![]() тела,
совершающего плоское движение, равна
геометрической сумме скорости полоса
и скорости точки в ее вращении вместе
с телом вокруг оси, проходящей через
полюс (рис.86):
тела,
совершающего плоское движение, равна
геометрической сумме скорости полоса
и скорости точки в ее вращении вместе
с телом вокруг оси, проходящей через
полюс (рис.86):

![]() , (2.32)
, (2.32)
где
![]() ,
,
![]() - угловая скорость звена.
- угловая скорость звена.
Вектор
скорости
![]() во вращательном движении направлен
перпендикулярно к отрезку
во вращательном движении направлен
перпендикулярно к отрезку![]() .
.
С корость
точки
корость
точки![]() колеса
(рис.87) складывается из скорости
полюса-центра колеса
колеса
(рис.87) складывается из скорости
полюса-центра колеса
![]() и
скорости
и
скорости
![]() во вращении точки
во вращении точки![]() вместе с колесом относительно оси
вместе с колесом относительно оси![]() .
.
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ТЕЛА
МЕТОДОМ ПОЛЮСА.
Пример №9.
Для
заданного положения шарнирного
четырехзвенника (рис.88) определить
скорость точки
![]() и угловую скорость звена
и угловую скорость звена![]() ,
если кривошип
,
если кривошип![]() вращается
с постоянной угловой скоростью
вращается
с постоянной угловой скоростью
![]() ,
,![]() ,
,![]() .
.
Р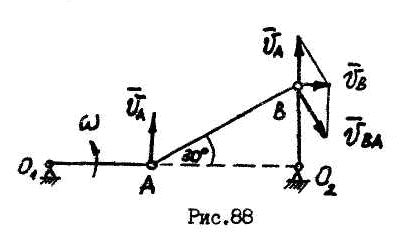 ешение:
ешение:
1. Определим скорость
точки
![]() ,
принадлежащей кривошипу
,
принадлежащей кривошипу![]() :
:
![]() .
.
2. Определим скорость
точки
![]() ,
принимая за полюс точку
,
принимая за полюс точку![]() :
:
![]() ,
,
![]() , (1)
, (1)
где
![]() - угловая скорость звена
- угловая скорость звена![]() .
.
Спроецируем
векторное равенство (1) на оси
![]() и
и![]() ,
направляя ось
,
направляя ось![]() вдоль звена
вдоль звена![]() .
.
На ось
![]() :
:![]() ;
;
![]() ;
;
На ось
![]() :
:![]() ;
;
![]()
![]() .
.
Проекции скоростей двух точек тела на прямую, соединяющую эти точки, равны между собой.

![]() (2.33)
(2.33)
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ТЕЛА ПО ТЕОРЕМЕ
О ПРОЕКЦИЯХ СКОРОСТЕЙ ДВУХ ТОЧЕК ТЕЛА.
Пример №10.
Стержень
![]() в точке
в точке![]() шарнирно связан со стержнем
шарнирно связан со стержнем![]() ,
который в точке
,
который в точке![]() скользит по наклонной плоскости (рис.90).
Определить скорость точки
скользит по наклонной плоскости (рис.90).
Определить скорость точки![]() стержня
стержня![]() в положении, когда
в положении, когда![]() и скорость
и скорость![]() стержня
стержня![]() равна
равна![]() .
.
Решение:
1. Стержень
![]() совершает поступательное движение,
следовательно, скорость точки
совершает поступательное движение,
следовательно, скорость точки![]() равна скорости
равна скорости![]() .
.
2. Скорость
![]() точки
точки![]() направлена вдоль плоскости, наклоненной
к горизонту под углом
направлена вдоль плоскости, наклоненной
к горизонту под углом![]() .
Применим теорему о проекциях скоростей
двух точек на прямую, соединяющую эти
точки:
.
Применим теорему о проекциях скоростей
двух точек на прямую, соединяющую эти
точки:

![]() ,
откуда
,
откуда
![]()
При определении
скоростей точек тела за полюс можно
принять точку
![]() ,
скорость которой равна
,
скорость которой равна![]() .
Такую точку называют мгновенным центром
скоростей (МЦС). В этом случае скоростьлюбой
точки тела будет равна:
.
Такую точку называют мгновенным центром
скоростей (МЦС). В этом случае скоростьлюбой
точки тела будет равна:
![]() (2.34)
(2.34)
где
![]() .
.
Следовательно, скорость любой точки тела пропорциональна расстоянию этой точки до МЦС (рис.91):
![]()
 ;
;
![]() ,
,
т.е. для всех точек тела соблюдается соотношение:
![]() . (2.35)
. (2.35)
При определении положения мгновенного центра скоростей (МЦС) возможны следующие случаи:
Положение МЦС заранее известно (рис.92).
Е сли
колесо
сли
колесо![]() обкатывается по неподвижному колесу
обкатывается по неподвижному колесу![]() ,
то МЦС - точка
,
то МЦС - точка![]() находится
в точке касания этих колес.
находится
в точке касания этих колес.
Скорость
точки
![]() ,
принадлежащей кривошипу
,
принадлежащей кривошипу![]() :
:
![]() .
.
Угловая
скорость колеса
![]() :
:
![]() .
.
Скорость
точки
![]() пропорциональна расстоянию
пропорциональна расстоянию![]() :
:
![]() .
.
Вектор
![]() скорости точки
скорости точки![]() направлен перепендикулярно отрезку
направлен перепендикулярно отрезку![]() .
.
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ТЕЛА С ПОМОЩЬЮ
МГНОВЕННОГО ЦЕНТРА СКОРОСТЕЙ.
Пример №11.
Определить
скорости точек
![]() и
и
![]() ступенчатого колеса, имеющего размеры
ступенчатого колеса, имеющего размеры![]() ,
,![]() (рис.93),
если скорость центра колеса
(рис.93),
если скорость центра колеса![]() .
.
Р ешение:
ешение:
Мгновенный
центр ступенчатого колеса находится
в точке
![]() ,
где
колесо касается неподвижной поверхности.
Для скоростей точек колеса можно
составить соотношение:
,
где
колесо касается неподвижной поверхности.
Для скоростей точек колеса можно
составить соотношение:
![]()
Угловая скорость колеса:
![]() .
.
2. Если
известны
по
направлению
скорости
двух
точек
тела
и
модуль
скорости
одной
точки,
то
МЦС
находится
на
пересечении
перпендикуляров,
проведенных
к
векторам
скоростей
этих
точек.
Если
для
кривошипно-ползунного
механизма
(рис.94)
задана
угловая
скорость
ведущего
звена,
то
скорость
точки
![]() можно
определить
по
формуле:
можно
определить
по
формуле:
![]() .
.
Вектор
![]() скорости
точки
скорости
точки
![]() направлен
перпендикулярно
звену
направлен
перпендикулярно
звену
![]() .
Ползун
.
Ползун
![]() движется
поступательно
в
горизонтальных
направляющих,
т.е.
направление
скорости
точки
движется
поступательно
в
горизонтальных
направляющих,
т.е.
направление
скорости
точки
![]() известно.
МЦС
звена
известно.
МЦС
звена
![]() находится
на
пересечении
перпендикуляров
находится
на
пересечении
перпендикуляров
![]() и
и
![]() ,
проведенных к векторам скоростей
,
проведенных к векторам скоростей
![]() и
и
![]() .
.
Д ля
определения скорости точки
ля
определения скорости точки
![]() и
угловой скорости шатуна
и
угловой скорости шатуна
![]() можно
составить соотношение:
можно
составить соотношение:
![]() .
.
Пример №12.
Конец
![]() стержня
стержня
![]() скользит
со
скоростью
скользит
со
скоростью
![]() по
наклонной
плоскости.
Другой
конец
по
наклонной
плоскости.
Другой
конец
![]() шарнирно
связан
с
роликом,
который
катится
без
скольжения
(рис.95).
Определить
скорость
центра
шарнирно
связан
с
роликом,
который
катится
без
скольжения
(рис.95).
Определить
скорость
центра
![]() ролика
и
угловую
скорость
ролика,
если
угол
ролика
и
угловую
скорость
ролика,
если
угол
![]() .
.
Р ешение:
ешение:
Мгновенный
центр
скоростей
ролика
находится
в
точке
![]() ,
где
ролик
касается
неподвижной
поверхности.
Векторы
,
где
ролик
касается
неподвижной
поверхности.
Векторы
![]() и
и
![]() скоростей
точек
скоростей
точек
![]() и
и
![]() направлены
перпендикулярно
линии
направлены
перпендикулярно
линии
![]() .
.
Скорость
точки
![]() определим
с
помощью
мгновенного
центра
скоростей
звена
определим
с
помощью
мгновенного
центра
скоростей
звена
![]() ,
который
находится
в
точке
,
который
находится
в
точке
![]() на
пересечении
перпендикуляров,
проведенных
к
векторам
скоростей
на
пересечении
перпендикуляров,
проведенных
к
векторам
скоростей
![]() и
и
![]() .
Скорости
.
Скорости
![]() и
и
![]() пропорциональны
расстояниям
соответствующих
точек
до МЦС:
пропорциональны
расстояниям
соответствующих
точек
до МЦС:
![]() .
.
Так
как
![]() - равносторонний,
- равносторонний,![]() ,
,
![]() .
.
Скорости точек
![]() и
и
![]() ролика с его угловой скоростью связаны
соотношением:
ролика с его угловой скоростью связаны
соотношением:
![]() ,
,
где
![]() - угловая скорость ролика;
- угловая скорость ролика;
![]() ;
;
![]() .
.
3. Если скорости
точек
![]() и
и![]() тела параллельны между собой, а линия
тела параллельны между собой, а линия
![]() не перпендикулярна вектору
не перпендикулярна вектору
![]() (рис.96), то мгновенный центр скоростей
звена
(рис.96), то мгновенный центр скоростей
звена
![]() будет находиться в бесконечности. Так
как
будет находиться в бесконечности. Так
как![]() ,
,
![]() ,
угловая скорость звена
,
угловая скорость звена
![]() будет равна нулю, что видно из соотношения:
будет равна нулю, что видно из соотношения:

![]() .
.
Шатун
![]() при повороте ведущего звена на
при повороте ведущего звена на![]() совершает мгновенно поступательно
движение. Для такого движения скорости
всех точек звена равны между собой:
совершает мгновенно поступательно
движение. Для такого движения скорости
всех точек звена равны между собой:
![]() ,
,
![]() .
.
Пример №13.
Для заданного
положения механизма (рис. 97) определить
скорость ползуна
![]() ,
угловую скорость звена
,
угловую скорость звена![]() ,
если кривошип
,
если кривошип![]() размером
размером![]() вращается с угловой скоростью
вращается с угловой скоростью![]() =1с-1,
=1с-1,
![]() ,
длина звена
,
длина звена
![]() ,
,
![]() .
.
Решение.

1. Определяем
скорость точки
![]() ,
принадлежащей кривошипу
,
принадлежащей кривошипу![]() :
:![]() м/с.
Вектор
м/с.
Вектор![]() скорости точки
скорости точки
![]() направлен перпендикулярно звену
направлен перпендикулярно звену
![]() .
Ползун
.
Ползун![]() движется в горизонтальных направляющих.
Векторы
движется в горизонтальных направляющих.
Векторы![]() и
и![]() скоростей точек
скоростей точек![]() и
и![]() параллельны между собой. Мгновенный
центр скоростей звена
параллельны между собой. Мгновенный
центр скоростей звена![]() находится в бесконечности, что следует
из соотношения:
находится в бесконечности, что следует
из соотношения:
 ,
,
где
![]() ,
,![]() ,
,![]() .
.
2.Следовательно,
звено
![]() совершает мгновенное поступательное
движение. Все точки звена
совершает мгновенное поступательное
движение. Все точки звена![]() движутся с одинаковыми по модулю и
направлению скоростями, т.е.
движутся с одинаковыми по модулю и
направлению скоростями, т.е.
![]() м/с.
м/с.
3. Ползун
![]() движется в вертикальных направляющих.
Мгновенный центр скоростей звена
движется в вертикальных направляющих.
Мгновенный центр скоростей звена![]() лежит в точке
лежит в точке![]() .
Для звена
.
Для звена![]() соблюдаются следующие соотношения:
соблюдаются следующие соотношения:
![]() .
.
Так как
![]() -
равнобедренный,
-
равнобедренный,![]() ,
скорости точек
,
скорости точек![]() и
и![]() равны между собой:
равны между собой:
![]() ;
;
угловая скорость
звена
![]() :
:![]() .
.
4. Если скорости
точек
![]() и
и![]() тела параллельны между собой и при этом
линия
тела параллельны между собой и при этом
линия![]() перпендикулярна вектору
перпендикулярна вектору![]() ,
то МЦС звена определяется геометрическим
построением (рис. 98,а, б).
,
то МЦС звена определяется геометрическим
построением (рис. 98,а, б).

Численные значения
скоростей точек
![]() и
и![]() должны быть известны. Положение МЦС
определяются из соотношения:
должны быть известны. Положение МЦС
определяются из соотношения:
![]()
Пример №14.
Дифференциальный
ворот состоит из двух валов
![]() и
и![]() с радиусами
с радиусами![]() и
и![]() ,
где
,
где![]() .
.
Н а
оба вала намотана одна нить, на которой
находится подвижный блок радиуса
а
оба вала намотана одна нить, на которой
находится подвижный блок радиуса![]() с подвешенным к нему грузом
с подвешенным к нему грузом![]() (рис. 99). Определить скорость груза,
угловую скорость подвижного блока, если
валам рукоятки сообщена угловая скорость
(рис. 99). Определить скорость груза,
угловую скорость подвижного блока, если
валам рукоятки сообщена угловая скорость![]() .
.
Решение:
1. Принимая, что
нить наматывается без проскальзывания,
выразим скорости точек
![]() и
и![]() через угловую скорость барабана и его
размеры:
через угловую скорость барабана и его
размеры:
![]() ;
;
![]() .
.
Подвижный блок
совершает плоскопараллельное движение.
Скорости двух точек блока
![]() и
и![]() параллельны и направлены в противоположные
стороны. Мгновенный центр скоростей
блока – точку
параллельны и направлены в противоположные
стороны. Мгновенный центр скоростей
блока – точку![]() ,
найдем построением. Положение точки
,
найдем построением. Положение точки![]() определим из соотношения:
определим из соотношения:
![]() .
.
Из свойства пропорции получим:
![]() ;
;
![]() ,
откуда
,
откуда
![]() .
.
Угловая скорость подвижного блока:
![]() .
.
Скорость груза
равна скорости центра блока, которая
пропорциональна расстоянию точки
![]() до мгновенного центра скоростей блока:
до мгновенного центра скоростей блока:
![]() ;
;
![]() .
.
![]() .
.
Пример №15.
Для заданного
положения механизма (рис. 100) определить
скорости точек
![]() ,
,![]() ,
,![]() ,
угловые скорости всех его звеньев, если
,
угловые скорости всех его звеньев, если![]() ,
,![]() ,
,![]() ,
,![]() .
.

Решение:
Зная угловую
скорость кривошипа
![]() ,
найдем скорость точки
,
найдем скорость точки![]() :
:![]()
Для колеса
![]() мгновенный центр скоростей находится
в точке
мгновенный центр скоростей находится
в точке![]() касания с неподвижным колесом 1. Угловая
скорость колеса
касания с неподвижным колесом 1. Угловая
скорость колеса![]() :
:
![]() .
.
Скорость точки
![]() ,
принадлежащей колесу
,
принадлежащей колесу![]() ,
пропорциональна расстоянию
,
пропорциональна расстоянию![]() :
:
![]()
Найдем скорость
точки
![]() ,
принадлежащей кривошипу
,
принадлежащей кривошипу![]() :
:![]()
Скорости точек
![]() и
и![]() колеса 3 известны по модулю и направлению.
Мгновенный центр скоростей колеса 3
находится в точке Р3.
Положение точки Р3
найдем из соотношений
колеса 3 известны по модулю и направлению.
Мгновенный центр скоростей колеса 3
находится в точке Р3.
Положение точки Р3
найдем из соотношений
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Пример №16.
Кривошип
![]() (рис. 101) вращается с угловой скоростью
(рис. 101) вращается с угловой скоростью![]() .
Колесо
.
Колесо![]() ,
соединенное с кривошипом в точке
,
соединенное с кривошипом в точке![]() ,
обкатывается по колесу
,
обкатывается по колесу![]() ,
вращающемуся с угловой скоростью
,
вращающемуся с угловой скоростью![]() .
Определить угловую скорость колеса
.
Определить угловую скорость колеса![]() и скорость точки
и скорость точки![]() ,
если
,
если![]() ,
,![]() .
.
Р ешение:
ешение:
1. Найдем скорость
точки
![]() ,
принадлежащей кривошипу
,
принадлежащей кривошипу![]() :
:![]() .
.
2. Определим скорость
точки
![]() ,
принадлежащей колесу 1, вращающемуся с
угловой скоростью
,
принадлежащей колесу 1, вращающемуся с
угловой скоростью![]() :
:![]() .
.
3. Для колеса
![]() ,
совершающего плоское движение, известны
скорости точек
,
совершающего плоское движение, известны
скорости точек![]() и
и![]() .
Мгновенный центр скоростей колеса
.
Мгновенный центр скоростей колеса![]() -точку
-точку![]() найдем построением. Угловую скорость
колеса
найдем построением. Угловую скорость
колеса![]() определим из соотношения:
определим из соотношения:
![]() .
.
Для определения положения мгновенного центра скоростей используем свойство пропорции:
![]() ;
;
![]()
![]() .
.
Скорость точки
![]() пропорциональна расстоянию
пропорциональна расстоянию![]() до МЦС:
до МЦС:![]() ;
;
![]() .
.
Вектор
![]() скорости точки
скорости точки![]() направлен перпендикулярно отрезку
направлен перпендикулярно отрезку![]() в сторону угловой скорости
в сторону угловой скорости![]() .
.
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ ТОЧЕК ТЕЛА ПРИ ПЛОСКОМ ДВИЖЕНИИ.
Ускорение любой
точки
![]() тела при плоском движении равно
геометрической сумме ускорения точки,
принятой за полюс, и ускорение точки в
ее вращении вместе с телом вокруг оси,
проходящей через полюс (рис. 102),
тела при плоском движении равно
геометрической сумме ускорения точки,
принятой за полюс, и ускорение точки в
ее вращении вместе с телом вокруг оси,
проходящей через полюс (рис. 102),

![]() .
(2.36)
.
(2.36)
Вектор
![]() направлен под углом
направлен под углом![]() к отрезку АВ, где
к отрезку АВ, где
 .
(2.37)
.
(2.37)
Так как значение
угла
![]() неизвестно,
предварительно вектор
неизвестно,
предварительно вектор![]() раскладывают на нормальную и касательную
составляющие:
раскладывают на нормальную и касательную
составляющие:
![]() ,
(2.38)
,
(2.38)
где
![]() ,
,![]() .
(2.39)
.
(2.39)

Вектор
![]() направлен всегда вдоль прямой
направлен всегда вдоль прямой![]() к полюсу
к полюсу![]() ,
вектор
,
вектор![]() направлен перпендикулярно отрезку
направлен перпендикулярно отрезку![]() в сторону вращения, если оно ускоренное
(рис. 103,а) или против вращения, если оно
замедленное (рис. 103, б).
в сторону вращения, если оно ускоренное
(рис. 103,а) или против вращения, если оно
замедленное (рис. 103, б).
Пример №17.
Для механизма,
изображенного на рис. 104, определить
ускорение ползуна
![]() и точки
и точки![]() ,
если колесо
,
если колесо![]() радиуса
радиуса![]() катится с постоянной скоростью его
центра
катится с постоянной скоростью его
центра![]() ,
угол
,
угол![]() ,
,![]() .
.
Р ешение:
ешение:
1. Колесо катится
по горизонтальной поверхности с
постоянной скоростью его центра, т.е.
![]() .
.
Выразим ускорение
точки
![]() ,
принимая за полюс точку
,
принимая за полюс точку![]()
![]() ,
(1)
,
(1)
где
![]() ,
,![]() ;
;
![]() и
и
![]() - соответственно угловая скорость и
угловое ускорение колеса.
- соответственно угловая скорость и
угловое ускорение колеса.
Так как центр
колеса движется с постоянной скоростью,
то
![]() ,
,![]() .
Следовательно,
.
Следовательно,
![]() .
.
Угловую скорость
колеса найдем, принимая во внимание,
что мгновенный центр колеса находится
в точке
![]() касания его с неподвижной поверхностью.
Тогда
касания его с неподвижной поверхностью.
Тогда
![]() ;
;
![]() .
.
2. Определим
ускорение точки
![]() ,
принимая за полюс точку
,
принимая за полюс точку![]() :
:
![]() .
(2) В векторном
равенстве (2) для вектора
.
(2) В векторном
равенстве (2) для вектора
![]() ускорение точки
ускорение точки![]() известно направление, так как ползун
известно направление, так как ползун![]() движется в горизонтальных направляющих.
Предполагаем, что вектор
движется в горизонтальных направляющих.
Предполагаем, что вектор![]() направлен по горизонтали вправо. Вектор
ускорения точки
направлен по горизонтали вправо. Вектор
ускорения точки![]() (полюса) известен по модулю и направлению.
Определим нормальную составляющую
ускорения звена
(полюса) известен по модулю и направлению.
Определим нормальную составляющую
ускорения звена![]() во вращательном движении вокруг полюса:
во вращательном движении вокруг полюса:![]() ,
,
где
![]() - угловая скорость звена
- угловая скорость звена![]() .
.
Так как векторы
скоростей
![]() и
и![]() точек
точек![]() и
и![]() звена
звена![]() параллельны между собой (рис. 104),
мгновенный центр скоростей звена
параллельны между собой (рис. 104),
мгновенный центр скоростей звена![]() находится в бесконечности, т.е. звено
находится в бесконечности, т.е. звено![]() совершает мгновенно поступательное
движение. Следовательно,
совершает мгновенно поступательное
движение. Следовательно,
![]() ,
,
![]() .
.
Выразим касательную составляющую ускорения:
![]() .
.
Численное значение
углового ускорения звена
![]() неизвестно. Вектор
неизвестно. Вектор![]() направлен перпендикулярно составляющей
направлен перпендикулярно составляющей![]() .
.
В векторном
равенстве (2) неизвестны численные
значения ускорений
![]() ,
,![]() .
.
Для их нахождения
спроецируем (2) на две взаимно
перпендикулярные оси координат
![]() и
и![]() ,
направляя ось
,
направляя ось![]() вдоль звена
вдоль звена![]() :
:
на ось
![]() :
:![]() ;
(3)
;
(3)
на ось у:
![]() .
(4)
.
(4)
Из уравнения (3) с
учетом того, что
![]() ,
получим
,
получим![]() .
.
Из уравнения (4)
определим составляющую
![]() :
:
![]()
Угловое ускорение
звена
![]() :
:
![]() .
.
3. Выразим ускорение
точки
![]() ,
принимая за полюс точку
,
принимая за полюс точку![]() .
.![]() .
(5)
.
(5)
Определим
предварительно величину составляющих
![]() ,
,![]() :
:
![]() ,
,
так как
![]() ;
;
![]()
Так как ускорение
точки
![]() неизвестно ни по модулю, ни по направлению,
определим его по проекциям на координатные
оси. Для этого необходимо спроецировать
векторное уравнение (5) на координатные
оси.
неизвестно ни по модулю, ни по направлению,
определим его по проекциям на координатные
оси. Для этого необходимо спроецировать
векторное уравнение (5) на координатные
оси.
![]() ;
;
![]() ;
;
![]() .
.
Пример №18.
Колесо радиуса
![]() катится без скольжения по горизонтальной
поверхности (рис. 105), имея в данный момент
времени скорость центраVA=1м/с
и ускорение аА=2м/с2.
Определить скорость и ускорение точки
В.
катится без скольжения по горизонтальной
поверхности (рис. 105), имея в данный момент
времени скорость центраVA=1м/с
и ускорение аА=2м/с2.
Определить скорость и ускорение точки
В.
Решение:
1 .
Выразим ускорение точки
.
Выразим ускорение точки![]() ,
принимая за полюс точку
,
принимая за полюс точку![]() :
:
![]() .
(1)
.
(1)
Так как направление
вектора ускорения точки
![]() неизвестно, необходимо определить
численные значения всех слагаемых
правой части векторного уравнения (1).
неизвестно, необходимо определить
численные значения всех слагаемых
правой части векторного уравнения (1).
Выразим касательную
и нормальную составляющие ускорения
![]() :
:
![]() ;
;
![]() ,
,
где
![]() ,
,![]() - соответственно угловая скорость и
угловое ускорение колеса.
- соответственно угловая скорость и
угловое ускорение колеса.
Угловую скорость
колеса определим, зная скорость точки
![]() и положение мгновенного центра скоростей
колеса – точки
и положение мгновенного центра скоростей
колеса – точки![]() :
:![]() .
.
Угловое ускорение
колеса определим как производную по
времени от угловой скорости колеса:
![]() ;
;
![]() ;
;
![]() .
.
Спроецируем
векторное равенство (1) на координатные
оси х и у:
![]() ;
;
![]() ;
;
![]() .
.
Пример №19.
Для плоского
механизма, состоящего из стержней 1, 2,
3, 4 и ползуна
![]() ,
соединенных между собой и с опорамиО1
и О2
шарнирно, положение механизма определяется
углами
,
соединенных между собой и с опорамиО1
и О2
шарнирно, положение механизма определяется
углами
![]() ,
,![]() ,
,![]() ,
,![]() (рис. 106).
(рис. 106).
В едущее
звено – кривошип ОА вращается с постоянной
угловой скоростью
едущее
звено – кривошип ОА вращается с постоянной
угловой скоростью![]() .
Определить скорость точки
.
Определить скорость точки![]() ,
угловую скорость и угловое ускорение
звена
,
угловую скорость и угловое ускорение
звена![]() ,
если размеры звеньев механизма
,
если размеры звеньев механизма![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.
Решение:
1. Определим скорость
точки
![]() кривошипа
кривошипа![]() :
:![]() .
.
Для звена
![]() известны направления скоростей
известны направления скоростей![]() и
и![]() точек
точек![]() и
и![]() ,
принадлежащих одновременно вращающимся
звеньям
,
принадлежащих одновременно вращающимся
звеньям![]() и
и![]() .
Мгновенный центр скоростей звена
.
Мгновенный центр скоростей звена![]() находится на пересечении перпендикуляров,
проведенных к векторам
находится на пересечении перпендикуляров,
проведенных к векторам![]() и
и![]() .
для точек
.
для точек![]() ,
,![]() ,
,![]() звена
звена![]() запишем соотношения:
запишем соотношения:
![]() ;
;
![]() ;
;
![]() .
.
Так как
![]() - равносторонний,
- равносторонний,![]() ,
следовательно,
,
следовательно,
![]() ;
;
![]() ;
;
![]() .
.
Вектор
![]() скорости точкиD
направлен перпендикулярно отрезку
скорости точкиD
направлен перпендикулярно отрезку
![]() ,
являющемуся высотой
,
являющемуся высотой![]() .
.
2. Скорость ползуна
![]() и угловую скорость звена 3 определим с
помощью мгновенного центра скоростей
звена 3, который находится в точке Р3.
Запишем соотношения для звена 3:
и угловую скорость звена 3 определим с
помощью мгновенного центра скоростей
звена 3, который находится в точке Р3.
Запишем соотношения для звена 3:
![]() .
.
Из
![]() выразим
выразим![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
3. Так как кривошип
О1А
вращается с постоянной угловой скоростью,
ускорение точки
![]() определим по формуле:
определим по формуле:![]() .
.
Принимая точку
![]() за полюс, выразим ускорение точки
за полюс, выразим ускорение точки![]() :
:
![]() .
(1)
.
(1)
Так как точка
![]() принадлежит звену
принадлежит звену![]() ,
вращающемуся вокруг оси
,
вращающемуся вокруг оси![]() ,
ускорение точки
,
ускорение точки![]() состоит из нормальной и касательной
составляющих:
состоит из нормальной и касательной
составляющих:
![]() .
(2)
.
(2)
Ускорение звена АЕ во вращательном движении состоит из двух слагаемых:
![]() .
(3)
.
(3)
С учетом (2) и (3) векторное равенство (1) примет вид:
![]() (4)
(4)
Выразим слагаемые векторного равенства (4):
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
В векторном
равенстве (4) слагаемые
![]() и
и![]() известны только по направлению. Для
нахождения двух неизвестных величин
спроецируем (4) на две координатные оси,
направляя ось х вдоль звена
известны только по направлению. Для
нахождения двух неизвестных величин
спроецируем (4) на две координатные оси,
направляя ось х вдоль звена![]() ,
а ось у – перпендикулярно звену:
,
а ось у – перпендикулярно звену:
на ось х:
![]() ,
(5)
,
(5)
на ось у:
![]() ,
(6)
,
(6)
из (5)

![]()
![]() .
.
Знак (-) показывает,
что направление вектора
![]() противоположно показанному на чертеже.
противоположно показанному на чертеже.
Из (6):
![]()
Зная ускорение
![]() ,
найдем угловое ускорение звена 2:
,
найдем угловое ускорение звена 2:![]() .
.