

1.3. Связи и реакции связи.
Условия, определяющие свободу движения твердого тела, называются связями. Сила, заменяющая действие связи, называется реакцией связи. Реакции связей - силы пассивные. Задаваемые силы, приложенные к твердому телу, называются активными. Связи реализуются в виде каких-то тел, не входящих в изучаемую механическую систему. Рассмотрим основные типы связей и их реакции.
1.3.1. Гладкая опорная поверхность.
Для гладкой опорной поверхности реакция направлена по нормали к опорной поверхности соприкасающихся тел в точке их касания и приложена в этой точке (рис. 13).
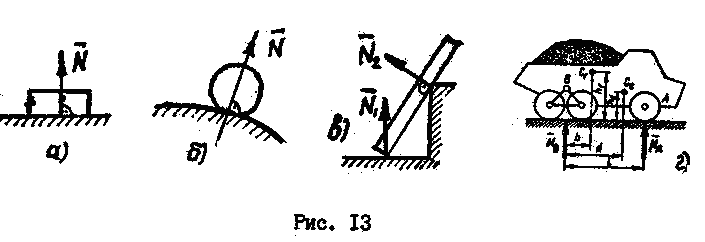
Если соприкасающиеся поверхности криволинейные, реакция связи проходит по общему перпендикуляру, проведенному через точку касания (рис.13,б). Если касание происходит в точке, реакция связи направлена по нормали к поверхности тела (рис.13,в). На рис.13,а и рис.13,г показаны реакции гладкой горизонтальной поверхности, без учета силы трения.
1.3.2. Гибкая нерастяжимая нить (трос,канат,цепь).
Гибкая
нерастяжимая нить препятствует удалению
тела
![]() от точки подвеса (рис.14).
от точки подвеса (рис.14).
Р еакция
натянутой нити направлена вдоль нити
к точке подвеса. Сила
еакция
натянутой нити направлена вдоль нити
к точке подвеса. Сила![]() ,
с которой груз
,
с которой груз![]() (рис.14,б) растягивает нить, называется
натяжение нити.
(рис.14,б) растягивает нить, называется
натяжение нити.
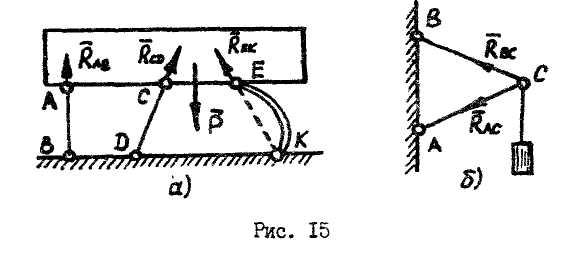
1.3.3. Невесомый стержень.
Стержень можно считать невесомым, если его собственный вес мал по сравнению с нагрузками, которые он воспринимает. Усилие, а следовательно, и реакция стержня направлены вдоль оси, проходящей через узловые точки, которыми стержень крепится к конструкции (рис. 15).
1.3.4. Шарнирное соединение.
Цилиндрическим шарниром называется соединение двух тел посредством пальца (болта), проходящего через отверстия в этих телах (рис. 16).
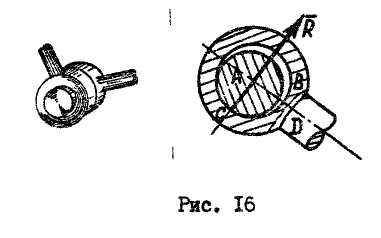 Шарнирное
соединение позволяет телу только
вращаться вокруг оси шарнира,
перпендикулярной плоскости рисунка.
Реакция шарнира должна быть направлена
по общему перпендикуляру к соприкасающимся
криволинейным поверхностям. Вследствие
разности размеров втулки и пальца
положение точки касания не определено,
поэтому
направление реакции цилиндрического
шарнира заранее неизвестно.
Шарнирное
соединение позволяет телу только
вращаться вокруг оси шарнира,
перпендикулярной плоскости рисунка.
Реакция шарнира должна быть направлена
по общему перпендикуляру к соприкасающимся
криволинейным поверхностям. Вследствие
разности размеров втулки и пальца
положение точки касания не определено,
поэтому
направление реакции цилиндрического
шарнира заранее неизвестно.

Реакцию
раскладывают на две составляющие
![]() и
и![]() (рис. 17), лежащие в плоскости,
перпендикулярной оси шарнира.
(рис. 17), лежащие в плоскости,
перпендикулярной оси шарнира.
В строительстве и машиностроении в конструкциях зданий, мостов, машин, станков, транспортных средств широко используются балочные системы. Материалом для изготовления балок служит металл, железобетон, дерево. Балки воспринимают нагрузки, поперечные относительно их осей. Опорные устройства балок предназначены для передачи усилий и соединения частей конструкции.
Шарнирно-неподвижная опора (рис. 18, а) допускает поворот балки вокруг оси шарнира, но не допускает никаких линейных перемещений.

Опорная
реакция приложена в центре
шарнира,
раскладывается на составляющие
![]() и
и
![]() .
Схематическое
изображение шарнирно-неподвижной опоры
можно представить одним из трех вариантов,
изображенных на рис. 18,б,в,г.
.
Схематическое
изображение шарнирно-неподвижной опоры
можно представить одним из трех вариантов,
изображенных на рис. 18,б,в,г.
1. 3 5. ШАРНИРНО-ПОДВИЖНАЯ ОПОРА (рис. 19, а) допускает поворот вокруг оси шарнира и линейное перемещение на небольшое расстояние вдоль опорной поверхности. Реакция такой опоры направлена перпендикулярно опорной поверхности (рис. 19, б, в, г).

1. 3. 6. ПОДПЯТНИК И СФЕРИЧЕСКИЙ ШАРНИР закрепляют какую-либо точку тела так, что она не может совершить никаких перемещений в пространстве (рис. 20, а).

Подпятники можно рассматривать как совокупность цилиндрического шарнира и опорной поверхности, поэтому реакция связи для такой опоры раскладывается на три составляющие: (рис. 20, б)
1.3.7. ЖЕСТКАЯ ЗАДЕЛКА (ЗАЩЕМЛЕНИЕ) (рис. 21,а) не допускает ни линейных перемещений, ни поворота.
 Для
такой опоры не известны на только
величина и направление реакции, но и
точка ее приложения. Для определения
опорной реакции необходимо найти три
неизвестные: составляющие
Для
такой опоры не известны на только
величина и направление реакции, но и
точка ее приложения. Для определения
опорной реакции необходимо найти три
неизвестные: составляющие
![]() и
и
![]() опорной
реакции по осям координат и реактивного
момента
опорной
реакции по осям координат и реактивного
момента
![]() относительно центра тяжести опорного
сечения. Второй конец балки всегда
свободный, поэтому такую балку называют
консольной.
относительно центра тяжести опорного
сечения. Второй конец балки всегда
свободный, поэтому такую балку называют
консольной.