

7. Дифференциальные уравнения движения механической системы.
Механической системой называется совокупность материальных точек или тел, положение и движение которых зависят от положения и движения всех остальных точек.
Механическая система может быть образована из свободных точек, движение которых не ограничено какими-либо геометрическими связями. Примером механической системы из точек с геометрическими связями служит любой механизм.
силы, действующие
на точки несвободной механической
системы, можно подразделить на активные
силы
![]() и реакции связей
и реакции связей![]() .
с другой стороны, действующие на точки
системы силы можно подразделить на
внешние
.
с другой стороны, действующие на точки
системы силы можно подразделить на
внешние![]() и на внутренние
и на внутренние![]() .
Внутренними силами взаимодействуют
между собой точки данной системы.
Внешними силами действуют на точки
системы точки или тела, не входящие в
данную систему. Главный вектор
.
Внутренними силами взаимодействуют
между собой точки данной системы.
Внешними силами действуют на точки
системы точки или тела, не входящие в
данную систему. Главный вектор![]() и главный момент
и главный момент![]() всех внутренних сил системы относительно
любого центра равны нулю:
всех внутренних сил системы относительно
любого центра равны нулю:
![]() ;
(7.1)
;
(7.1)
![]() .
(7.2)
.
(7.2)
Для n
точек механической системы можно
записать n
дифференциальных уравнений движения
в векторной форме типа
![]() (7.3) или 3n
дифференциальных уравнения движения
в проекциях на координатные оси вида:
(7.3) или 3n
дифференциальных уравнения движения
в проекциях на координатные оси вида:
![]()
![]()
![]() ;
;
![]() ;
;
![]() .
(7.4)
.
(7.4)
Чтобы найти уравнение движения механической системы под действием заданных сил, необходимо проинтегрировать при известных начальных условиях систему дифференциальных уравнений второго порядка, что сопряжено с большими трудностями.
Дифференциальные уравнения движения механической системы можно использовать для вывода общих теорем динамики, с помощью которых можно решать задачи о движении материальной точки или механической системы, установить зависимость между основными динамическими характеристиками механического движения материальных тел.
8. Теорема о движении центра масс.
Центром масс или центром инерции системы является геометрическая точка, положение которой определяется в каждый момент времени:
![]() ,
,
![]() ,
,![]() ,
(8.1) где М – масса системы,
равная сумме масс всех точек системы;
,
(8.1) где М – масса системы,
равная сумме масс всех точек системы;
mk-- масса произвольной точки Mk;
xk, yk, zk – координаты произвольной точки Mk системы.
В однородном поле земного тяготения центр масс совпадает с центром тяжести.
Центр масс существует для любой механической системы независимо от действующих сил.
Центр масс системы движется как материальная точка, масса которой равна массе всей системы и к которой приложен все внешние силы, действующие на систему (теорема о движении центра масс).
![]() ,
(8.2) где М—масса
системы;
,
(8.2) где М—масса
системы;
ac—ускорение центра масс;
![]() --
главный вектор всех внешних сил системы.
--
главный вектор всех внешних сил системы.
Теорема о движении центра масс имеет два следствия, которые определяют закон сохранения движения центра масс.
Рисунок 18
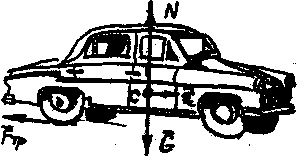
В автомобиле (рис.
18) действие газов на поршень двигателя
является внутренней силой. Внешние силы
– это сила тяжести автомобиля
![]() ,
нормальна реакция дороги
,
нормальна реакция дороги![]() ,
сила трения
,
сила трения![]() между колесами автомобиля и дороги. При
отсутствии сцепления колес с дорогой
(
между колесами автомобиля и дороги. При
отсутствии сцепления колес с дорогой
(![]() =0)
действие внутренних сил не может изменить
закона движения центра масс. Если
=0)
действие внутренних сил не может изменить
закона движения центра масс. Если![]() ,
,![]() ,
то поэтому
,
то поэтому![]() .
При начальной скорости центра масс
.
При начальной скорости центра масс![]() ,
центр масс будет оставаться в покое.
,
центр масс будет оставаться в покое.
2. Если сумма
проекций всех внешних сил, действующих
на систему, на какую-либо ось равна нулю,
то проекция скорости центра масс на
данную ось будет оставаться постоянной.
Если
![]() ,
то
,
то![]() ,
поэтому
,
поэтому![]() .
Если в начальный момент времени
.
Если в начальный момент времени![]() ,
то учитывая, что
,
то учитывая, что![]() ,
координата центра масс остается
постоянной (xc=const).
Для человека, стоящего на абсолютно
гладкой горизонтальной поверхности
(рис. 19), внешними силами является его
вес
,
координата центра масс остается
постоянной (xc=const).
Для человека, стоящего на абсолютно
гладкой горизонтальной поверхности
(рис. 19), внешними силами является его
вес
![]() и нормальная реакция
и нормальная реакция![]() .
Сила трения на гладкой поверхности
отсутствует, т.е.
.
Сила трения на гладкой поверхности
отсутствует, т.е.![]() ,xc=const.На
гладкой поверхности человек может
подпрыгнуть в вертикальном направлении,
так как в проекции на ось у теорема о
движении масс
,xc=const.На
гладкой поверхности человек может
подпрыгнуть в вертикальном направлении,
так как в проекции на ось у теорема о
движении масс
п оэтому
оэтому![]() >0, т.е. центр масс может переместиться
по вертикали. Перемещение по горизонтали
будет возможно при действии силы трения
скольжения (рис. 19,б). Применяя теорему
о движении центра масс, можно решать
прямую и обратную задачи динамики
поступательного движения в следующей
последовательности:
>0, т.е. центр масс может переместиться
по вертикали. Перемещение по горизонтали
будет возможно при действии силы трения
скольжения (рис. 19,б). Применяя теорему
о движении центра масс, можно решать
прямую и обратную задачи динамики
поступательного движения в следующей
последовательности:
имеет вид
![]() .
При отталкивании от земли за счет
деформации мышцR>P,
.
При отталкивании от земли за счет
деформации мышцR>P,
1. выбрать систему координат;
2. изобразить все внешние силы;
3. записать теорему о движении центра масс в проекции на ось координат;
4. определить искомые величины в соответствии с условиями задачи.
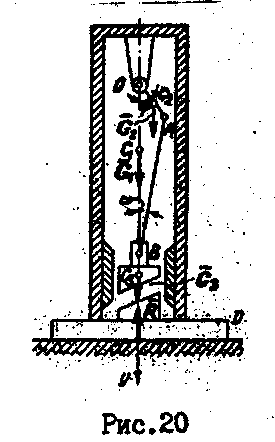
ПРИМЕР 10.
Определить действие
фундамента кривошипного пресса при
холостом ходе, если кривошип ОА=r
вращается с постоянной угловой скоростью
![]() ,
длина кривошипа АВ=
,
длина кривошипа АВ=![]() ,
вес фундамента и корпусаG1,
вес кривошипа
G2,
вес штампа В
G3.
В начальный момент кривошип занимал
вертикальное нижнее положение (рис.
20).
,
вес фундамента и корпусаG1,
вес кривошипа
G2,
вес штампа В
G3.
В начальный момент кривошип занимал
вертикальное нижнее положение (рис.
20).
РЕШЕНИЕ.
1. На пресс действуют
внешние силы: сила тяжести корпуса с
фундаментом
![]() ,
кривошипа
,
кривошипа![]() ,
штампа
,
штампа![]() и нормальная реакция грунта
и нормальная реакция грунта![]() .
.
 2.
Запишем теорему о движении центра масс
системы в проекции на ось у:
2.
Запишем теорему о движении центра масс
системы в проекции на ось у:
![]() ,
(1) где
,
(1) где![]()
![]() .
(2)
.
(2)
3. Выразим ординату
ус
центра масс
![]() ,
(3) гдеG=G1+G2+G3.
,
(3) гдеG=G1+G2+G3.
Угол поворота
кривошипа
![]() .
.
y1=OC1=const;
y2=OC2cos![]() =0,5rcos
=0,5rcos![]() ;
;
y3=OAcos![]() +ABcos
+ABcos![]() +BC3=2cos
+BC3=2cos![]() +
+![]() cos
cos![]() +BC3;
где
ВС3=const.
+BC3;
где
ВС3=const.
Из
![]() ОАВ:
ОАВ:![]() ;
;![]() ;
;![]() .
.
Если разложить
![]() в ряд, отбросив члены ряда, содержащие
в ряд, отбросив члены ряда, содержащие![]() в степени выше второй, получим
в степени выше второй, получим ~
~![]() ;
тогда
;
тогда![]() ;
; .
(4)
.
(4)
Продифференцируем
(4) дважды по времени и подставим в (1)
![]() ;
(5)
;
(5)
![]()
![]() ;
отсюда находим нормальную реакцию
грунта, а следовательно, величину
давления на фундамент в зависимости от
угла поворота кривошипа
;
отсюда находим нормальную реакцию
грунта, а следовательно, величину
давления на фундамент в зависимости от
угла поворота кривошипа
![]() .
.
ПРИМЕР 11.
Механическая
система состоит из прямоугольной
вертикальной плиты 1 массой m1=18кг,
движущейся вдоль горизонтальных
направляющих, и груза D
массой m2=6кг.
В момент времени t0=0,
когда плита двигалась со скоростью
u0=2м/с,
груз начал двигаться вдоль желоба в
соответствии с уравнением S=AD=0,4sin(![]() t2)
(S—в
метрах, t—в
секундах (рис. 21)). Определить скорость
плиты в момент времени t1=1с.
t2)
(S—в
метрах, t—в
секундах (рис. 21)). Определить скорость
плиты в момент времени t1=1с.
Р ЕШЕНИЕ.
ЕШЕНИЕ.
1. Внешними силами,
действующими на систему, являются вес
пластины
![]() ,
вес груза
,
вес груза![]() и нормальная реакция поверхности
и нормальная реакция поверхности![]() .
.
2. Применим теорему
о движении центра масс в проекции на
ось х:
![]() .
(1) Так как
.
(1) Так как![]() ,
,![]() ,
то
,
то![]() .
(2)
.
(2)
3. Выразим произведение
![]() ,
где х1,
х2
– абсциссы плиты и груза.
,
где х1,
х2
– абсциссы плиты и груза.
![]() .
Тогда
.
Тогда![]() .
(3) Продифференцируем (3) по времени
.
(3) Продифференцируем (3) по времени![]() ,
(4) где
,
(4) где![]() -- искомая скорость плиты.
-- искомая скорость плиты.
При t=0
u1=u0;
![]() .
.
Следовательно,
С1=(m1+m2)u0.
(5) С учетом (2), (4) и (5) получим
![]() ,
откуда находим скорость плиты
,
откуда находим скорость плиты![]() .
.
При t1=1c
![]() м/с.
м/с.