

5. Прямолинейые колебания точки.
Собственные
колебания точки происходит под действием
восстанавливающей силы
![]() ,
направленной к положению равновесия и
пропорциональной расстоянию от этого
центра (рис. 8). Проекция силы
,
направленной к положению равновесия и
пропорциональной расстоянию от этого
центра (рис. 8). Проекция силы![]() на ось х равнаFx=-cx.
(5.1)
на ось х равнаFx=-cx.
(5.1)
Дифференциальное
уравнения движения точки М под действием
силы
где с—коэффициент
пропорциональности.
![]() имеет вид
имеет вид![]() ,
(5.2)
,
(5.2)
Если
![]() --
сила упругости пружины, коэффициент с
называется жесткостью пружины. Размерность
жесткости --
--
сила упругости пружины, коэффициент с
называется жесткостью пружины. Размерность
жесткости --![]() .
Жесткость пружины показывает, какую
силу в Н необходимо приложить к пружине,
чтобы растянуть (или сжать) ее на единицу
длины (1м.).
.
Жесткость пружины показывает, какую
силу в Н необходимо приложить к пружине,
чтобы растянуть (или сжать) ее на единицу
длины (1м.).
Дифференциальное уравнение собственных колебаний точки имеет вид
![]() ;
(5.3)
;
(5.3)
где
![]() --
циклическая частота.
--
циклическая частота.
Общее решение дифференциального уравнения (5.3) можно представить в виде
![]() ,
(5.4)
,
(5.4)
где С1, С2—постоянные интегрирования, определяемые из начальных условий
![]() ,
,
![]() (5.5)
(5.5)
Общее решение дифференциального уравнения собственных колебаний в амплитудной форме
![]() ,
(5.6)
,
(5.6)
где А—амплитуда колебаний;
![]() --
начальная фаза.
--
начальная фаза.
 ,
(5.7)
,
(5.7)
![]() .
(5.8)
.
(5.8)
Период колебания
![]() .
(5.9)
.
(5.9)
График собственных колебаний точки изображен на рис. 9.
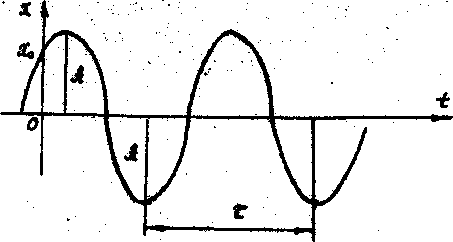
Рисунок 9
Колебания груза, подвешенного на пружине.
В недеформированном
состоянии пружина имеет длину l
(рис. 10). Если к концу пружины подвесить
груз, пружина растянется на длину![]() ,
где
,
где![]() --
статическое удлинение пружины, зависящее
от веса груза и упругих свойств пружины.
--
статическое удлинение пружины, зависящее
от веса груза и упругих свойств пружины.
Колебания груза
могут начаться только при не равных
нулю начальных условиях, так как
амплитуда колебаний зависит от х0
и V0
(см. уравнение (5.7)). Если начало координат
поместить в положение статического
равновесия – точку О, а затем вывести
груз из положения равновесия, растянув
пружину до длины l0
и сообщить грузу начальную скорость
V0,
то в произвольный момент времени
деформация пружины
или
![]() .
Дифференциальное уравнение движения
груза в проекции на ось х имеет вид:
.
Дифференциальное уравнение движения
груза в проекции на ось х имеет вид:![]() (5.10)
(5.10)![]() .
(5.11)
.
(5.11)

Так как
![]() ,
уравнение (5.11) имеет вид
,
уравнение (5.11) имеет вид![]() ,
т.е. действие постоянной силы
,
т.е. действие постоянной силы![]() не изменяет характера колебательного
движения (см. уравнение (5.2)).
не изменяет характера колебательного
движения (см. уравнение (5.2)).
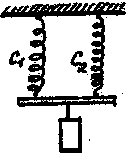
Если груз прикреплен к двум пружинам с жесткостью С1 и С2, то их заменяют одной пружиной с эквивалентной жесткостью, зависящей от соединения пружин. При последовательном соединении пружин (рис. 11)
![]() .(5.12)
.(5.12)
При параллельном соединении пружин (рис. 11)
![]() .
(5.13)
.
(5.13)
Если на точку кроме восстанавливающей силы (рис. 12) действует сила линейного сопротивления
![]() , то дифференциальное
уравнение движения точки будет
, то дифференциальное
уравнение движения точки будет
![]() .
(5.14)
.
(5.14)
Рисунок 11

Если
зависит от
соотношения между коэффициентами k
и n.

![]() ,
,![]() ,
гдеn
– коэффициент сопротивления, то общее
решение дифференциального уравнения
,
гдеn
– коэффициент сопротивления, то общее
решение дифференциального уравнения
![]() (5.15)
(5.15)
1. В случае малого сопротивления при n<k точка совершает затухающие колебания по следующему закону
![]() ,
(5.16)
,
(5.16)
или
![]() ,
(5.17)
,
(5.17)
где С1,
С2
или А,
![]() -- постоянные интегрирования, определяемые
из начальных условий С1=х0;
-- постоянные интегрирования, определяемые
из начальных условий С1=х0;
![]() ;
(5.18)
;
(5.18)
 ;
;
![]() .
(5.19)
.
(5.19)
Период затухающих
колебаний
![]() .
(5.20)
.
(5.20)
Убывание амплитуды затухающих колебаний определяется декрементом
![]()
![]() .
(5.21)
.
(5.21)
График затухающих
колебаний располагается между двумя
огибающими:
![]() и
и![]() (рис. 13).
(рис. 13).
![]()

Рисунок 13
2. При n>k имеем случай большого сопротивления, точка совершает апериодическое (непериодическое) затухающее движение согласно уравнению
![]() ,
(5.22)
,
(5.22)
где
![]() .
.
Рисунок
13
1.
2.
3.

![]() ;
;![]() >0;
>0;![]() >0;
>0;
![]() ;
;![]() >0;
>0;
![]() <0.
<0.
Во всех трех случаях движение быстро затухает.
3. При n=k будет случай критического (предельного) сопротивления. Точка совершает затухающее апериодическое движение по закону
![]() (5.23)
(5.23)
или после определения постоянных интегрирования
![]() .
(5.24)
.
(5.24)
Характер затухания зависит от начальных условий (рис. 14).
ПРИМЕР 7.
Груз весом Р=98н
подвешен к нижнему концу вертикальной
пружины, верхний конец которой закреплен
неподвижно (рис. 15). Жесткость пружины
с=2,5н/см, а длина ее в недеформированном
состоянии равна l=60см.
Выбрав начало координат в положении
статического равновесия и направив
ось Оу по вертикали вниз, найти закон
движения груза и период его колебаний,
если в начальный момент времени длина
пружины равна l0=59,5см
и грузу сообщена начальная скорость
V0=200см/с.
РЕШЕНИЕ.
1. В произвольный
момент времени груз находится на
расстоянии у от положения статического
равновесия, принятого за начало координат.
На груз действует сила тяжести
![]() и сила упругости пружины
и сила упругости пружины![]() .
В положении статического равновесия
.
В положении статического равновесия![]() .
(1)
.
(1)
2. Составим
дифференциальное уравнение движения
груза в проекции на ось у:
![]() (2)
(2)
или
![]() .
(3)
.
(3)
Тогда с учетом (1)
уравнение (3) примет вид
![]() .
(4)
.
(4)
Разделим обе части
уравнения на m
и введем обозначение
![]() .
Тогда получим
.
Тогда получим![]() .
(5)
.
(5)
Решение дифференциального уравнения (5) выразим в виде y=C1coskt+C2sinkt. (6)
Постоянные интегрирования С1 и С2 определяем из начальных условий, предварительно продифференцировав по времени уравнение (6):
![]() .
(7)
.
(7)
При t=0 у=у0 из уравнения (6): у0=С1;
из
уравнения (7): V0=kС2;
![]() .
.
Из (рис. 15) видно,
что
![]() ;
;
![]() см;
см;
![]() у0=-[(60+39,2)-59,2]=--40см;
у0=-[(60+39,2)-59,2]=--40см;
![]() ;
С1=у0=
-40;
;
С1=у0=
-40;
![]()
Уравнение движения груза имеет вид у=-40cos5t+40sin5t.
Период колебания
груза
![]()