

18. Общее уравнение динамаики.
Принцип возможных перемещений дает общий метод решения задач статики. Принцип Даламбера использует методы статики для решения задач динамики. Применяя два эти принципа одновременно, можно получить общий метод решения задач динамики.
При движении
механической системы с идеальными
связями сумма элементарных работ
заданных сил и сил инерции на любом
возможном перемещении системы равна
нулю
![]() (18.1) или
(18.1) или![]() .
(18.2)
.
(18.2)
Рисунок 60

При наличии сил трения их нужно причислить к задаваемым силам. С помощью общего уравнения динамики можно определять силы по заданному движению (прямая задача динамики) или определять движение по заданным силам (обратная задача динамики). Для решения задач с помощью общего уравнения динамики необходимо:
показать на схеме активные силы и реакции неидеальных связей (например, силы трения);
добавить к активным силам силы инерции;
дать возможное перемещение точкам системы, выражая перемещение всех точек через возможное перемещение одной из точек системы;
составить общее уравнение динамики, вычисляя сумму элементарных работ всех активных сил и сил инерции на возможном перемещении точки их приложения;
решить полученное уравнение в соответствии с условием задачи
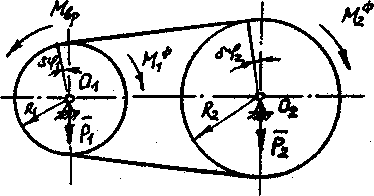
ПРИМЕР 26.
К шкиву 1 ременной
передачи (рис. 61) приложен вращающий
момент Мвр=3Нм.
Массы шкивов равномерно распределены
по их ободам и соответственно равны
m1=1кг
и m2=2кг.
Радиус шкива 1 R1=0,1м.
Пренебрегая трением, определить угловое
ускорение шкива 1.
Рисунок 61
РЕШЕНИЕ.
1. Массы шкивов равномерно распределены по их ободам и пропорциональны размерам:

![]() ;(1)
;(1)![]() ,
,
где
![]() --
плотность материала шкивов. Используя
выражение (1), можно определить размер
второго шкива
--
плотность материала шкивов. Используя
выражение (1), можно определить размер
второго шкива
![]() ;
;
![]() м.
м.
2. Силы инерции
точек шкивов приводятся к моментам сил
инерции, которые соответственно равны
![]() ;
(2)
;
(2)
![]() .
(3)
.
(3)
Угловые ускорения колес обратно пропорциональны их радиусам, т.е.
![]() или
или
![]() .
Тогда
.
Тогда![]() .
(4)
.
(4)
3. Запишем общее
уравнение динамики
![]() .
(5) Дадим системе возможное
перемещение: шкив 1 повернется на угол
.
(5) Дадим системе возможное
перемещение: шкив 1 повернется на угол![]() ,
шкив 2—на угол
,
шкив 2—на угол![]() .
Вычислим работу активных сил и сил
инерции на возможном перемещении системы
.
Вычислим работу активных сил и сил
инерции на возможном перемещении системы![]() .
(6) Выразим возможное
перемещение
.
(6) Выразим возможное
перемещение![]() шкива 2 через
шкива 2 через![]() :
:![]() .
Тогда, с учетом (2) и (4), получим:
.
Тогда, с учетом (2) и (4), получим: .
(7) Так как
.
(7) Так как![]() ,
приравниваем нулю выражение
,
приравниваем нулю выражение ,
из которого находим угловое ускорение
шкива 1:
,
из которого находим угловое ускорение
шкива 1:![]() с-2.
с-2.
ПРИМЕР 27.
Механическая
система состоит из однородных ступенчатых
шкивов 1 и 2, обмотанных нитями, грузов
3, 4 и 5, прикрепленных к этим нитям, и
невесомого блока 2. Система движется в
вертикальной плоскости под действием
сил тяжести и пары сил с моментом М=12Нм.,
приложенных к шкиву 1. Радиусы ступеней
шкива равны: R1=0,2м,
r1=0,1м,
а шкива 2—R2=0,3м
и r2=0,15м;радиус
инерции шкива 1 относительно оси вращения
![]() =0,1м
(рис. 62). Пренебрегая трением, определить
ускорение груза 3, если Р1=30Н,
Р3=40Н,
Р4=20Н,
Р5=10Н.
=0,1м
(рис. 62). Пренебрегая трением, определить
ускорение груза 3, если Р1=30Н,
Р3=40Н,
Р4=20Н,
Р5=10Н.
РЕШЕНИЕ.
1. Рассмотрим движение механической системы, состоящей из тел 1, 2, 3, 4, 5, соединенных нитями. Система имеет одну степень свободы. Связи, наложенные на тела системы, относятся к идеальным. Для определения ускорения груза 3 применим общее уравнение динамики:
Рисунок 62

![]() ,
(1) где
,
(1) где
![]() --
сумма элементарных работ активных сил;
--
сумма элементарных работ активных сил;
![]() --
сумма элементарных работ сил инерции.
--
сумма элементарных работ сил инерции.
2. Покажем активные
силы:
![]() ,
,![]() ,
,![]() ,
,![]() и пару сил с моментом М. Зададим направление
ускорения груза 3 и покажем силы инерции
и пару сил с моментом М. Зададим направление
ускорения груза 3 и покажем силы инерции![]() ,
,![]() ,
,![]() и момент сил инерции
и момент сил инерции![]() :
:![]() ;
;
![]() ;
;
![]() ;
(2)
;
(2)
![]() .
.
3. Дадим системе
возможное перемещение и составим
уравнение (1).
![]() .
Выразим все перемещения через
.
Выразим все перемещения через![]() :
:![]() ;
;
![]() ;
;
![]() ;
(3)
;
(3)
![]() .
С учетом выражений
(2) и (3) уравнение (1) примет вид:
.
С учетом выражений
(2) и (3) уравнение (1) примет вид:
![]() (4) или
(4) или .
(5)
.
(5)
Выразим
![]() ,
,![]() ,
,![]() через искомое ускорение груза
через искомое ускорение груза![]() :
:
![]() ;
;
![]() ;
;![]() .
(6) Так как
.
(6) Так как![]() ,
с учетом (6) приравниваем нулю выражение
(5):
,
с учетом (6) приравниваем нулю выражение
(5):![]() .
Откуда определим ускорение
.
Откуда определим ускорение![]() груза 3:
груза 3: .
.