

fizika
.pdf2.3. Второй закон Ньютона |
111 |
Второй закон Ньютона справедлив для инерциальных систем отсчета. Масса m в равенствах (2.5 и 2.6) называется инерциальной, являетсяG мерой инертности тела, котороеGпод действием конечной силы F , приобретает конечное ускорение a , а в отсутствии ее находится в состоянии покоя или движется прямолинейно и равномерно.
Для тела, у которого масса изменяется с течением времени (на-
пример, при полете ракеты) |
G |
|
|
|
|||
G |
|
d |
G |
G dm |
|||
|
dυ |
||||||
F |
= |
|
(mυ) = m |
|
+ υ |
|
. |
dt |
dt |
dt |
|||||
Соотношение (2.6) используется для определения единицы измерения силы. В системе единиц СИ масса m измеряется в кг, ускорение а в м/с2. Единица измерения силы — кг · м/с2, называется ньютон (Н). Один ньютон — это такая сила, под действием которой тело массой 1 кг приобретает ускорение 1 м/с2.
2.4. УРАВНЕНИЕ ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
Второй закон Ньютона, записанный в дифференциальной форме |
||||||||
|
G |
G |
|
d |
2 G |
G |
|
|
|
dυ |
|
r |
|
||||
m |
|
= F или |
m |
|
|
= F , |
(2.7) |
|
dt |
dt2 |
|||||||
|
|
|
|
|
||||
называется основным уравнением динамики материальной точки.
С помощью уравнений (2.7) решаются задачи: |
rG(t) |
|
— по известной зависимости от времени радиус-вектора |
и |
|
G |
|
|
заданной массе определяется результирующая сила FG; |
|
|
— по известным начальным значениям скорости υ0 , радиус-век- |
||
тора rG , массы m и действующей на точку результирующей силы |
FG |
|
0 |
|
|
определяется зависимость от времени ее радиус-вектора rG(t) . |
|
|
В первой задаче проводится дифференцирование rG(t) по времени, |
||
во второй — интегрирование. Задачи решаются в скалярной форме с |
|||||||||
|
|
|
|
|
G |
G G |
|
|
|
помощью проекций векторов r, υ, F на координатные оси X, Y, Z или |
|||||||||
на касательную τ |
и нормаль n в заданной точке траектории. |
||||||||
В проекциях на координатные оси уравнения (2.7) имеют вид |
|||||||||
m |
d 2 r |
= F , |
m |
d 2 ry |
= F , m |
d 2 r |
= F или |
||
|
x |
|
z |
||||||
dt2 |
dt2 |
dt2 |
|||||||
|
x |
|
y |
z |
|||||

112 |
|
|
|
|
|
|
Глава 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ |
|||||
m |
dυ |
x |
= F , |
m |
|
dυ y |
= F , |
m |
dυ |
z |
= F , |
|
|
|
|
|
|
|
|
||||||
|
dt |
|
x |
|
|
dt |
y |
|
dt |
|
z |
G |
|
|
|
|
|
|
|
|
G G |
||||
где rx , ry , rz , υx , υ y , υz , Fx , Fy , Fz |
|
|
|
|
|
|
||||||
— проекции векторов r, υ, F на коор- |
||||||||||||
динатные оси.
В проекциях на касательную и нормаль в заданной точке траек-
тории уравнения (2.7) записываются в виде |
|
||||||||||||
|
|
|
|
|
|
m |
dυ |
τ |
= F , |
m |
υ2 |
= F , |
(2.8) |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
dt |
|
τ |
|
R |
n |
|
|
dυτ |
|
υ2 |
|
|
|
|
|
G G |
||||
|
|
|
|
|
|
|
|
|
|||||
где |
|
|
= aτ , |
|
= an |
— касательное и нормальное ускорение, τ, n — |
|||||||
dt |
|
R |
|||||||||||
подвижные взаимно-перпендикулярные орты, Fτ , Fn |
— проекции |
||||||||||||
вектора результирующей силы FG |
на орты τG, nG . |
|
|||||||||||
|
|
|
|
|
2.5. ТРЕТИЙ ЗАКОН НЬЮТОНА |
|
|||||||
m1 |
|
FG1,2 |
FG2,1 |
m2 |
|
|
|
Всякое действие тел друг на друга носит |
|||||
|
|
характер взаимодействия. Опыт показывает, |
|||||||||||
|
аG1 |
|
|
|
аG2 |
|
что одно тело действует на другое с силами, |
||||||
|
|
|
|
|
совпадающими по модулю и противополож- |
||||||||
|
|
|
|
|
|
|
ными по направлению (рис. 2.2). |
||||||
|
|
|
Рис. 2.2 |
|
|
|
|
Это опытное наблюдение сформулиро- |
|||||
|
|
|
|
|
|
|
вано Ньютоном в виде третьего закона ди- |
||||||
намики: силы, с которыми взаимодействуют тела равны по величине |
|||||||||
|
FG1,2 |
|
= |
|
|
|
|
и противоположны по направлению |
|
|
|
F2,1 |
|
|
|||||
|
G |
|
|
|
G |
FG1,2 = − FG2,1 . |
(2.9) |
||
|
FG1,2 где F1,2 |
— сила, действующая на первое тело со стороны второго, |
|||||||
|
F2,1 |
|
— сила, действующая на второе тело со стороны первого. |
|
|||||
Поскольку силы взаимодействия приложены к разным телам, то они не могут вызывать их перемещение в одном направлении. Силы взаимодействия проявляются в паре, приложены к взаимодействующим телам и являяются силами одной природы.
Направление ускорений взаимодействующих тел противоположно (рис. 2.2).
В третьем законе Ньютона предполагается, что обе силы равны по модулю в любой момент времени независимо от движения точек. Это
2.6. Принцип относительности Галилея. Неинерциальные системы отсчета |
113 |
утверждение соответствует ньютоновскому представлению о мгновенном распространении взаимодействий, которое носит название принципа дальнодействия. Согласно этому принципу взаимодействие между телами распространяется в пространстве с бесконечно большой скоростью.
Вопросы и задания для самопроверки
1.Дайте определение первого закона Ньютона.
2.Дайте определение инерциальной системы отсчета.
3.Назовите необходимые условия инерциальности системы отсчета.
4.Дайте определение силы, массы, импульса тела.
5.Запишите второй закон Ньютона с использованием понятий силы, импульса силы, импульса тела.
6.Запишите второй закон Ньютона для тела с изменяющейся мас-
сой.
7.Запишите основное уравнение динамики.
8.Какие задачи решаются с помощью основного уравнения динамики?
9.Что утверждает третий закон Ньютона?
10.Для каких систем отсчета выполняются законы Ньютона?
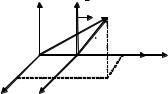
2.6. ПРИНЦИП ОТНОСИТЕЛЬНОСТИ ГАЛИЛЕЯ. НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЕТА
Принцип относительности Галилея состоит в том, что все механические явления в инерциальных системах отсчета протекают оди-
наковым образом и, следовательно, |
Z |
|
Z' |
|
|
никаким опытом невозможно уста- |
|
|
|||
|
|
u |
A |
||
новить, покоится данная система от- |
|
|
|||
|
Gr |
|
|
||
счета или движется прямолинейно и |
|
r' |
z' |
||
равномерно. |
0 |
0' |
|||
|
X X' |
||||
Рассмотрим систему отсче- |
|
|
|
||
та X' Y' Z' , движущуюся относитель- |
y |
y' |
|
|
|
но инерциальной системы X, Y, Z с |
|
|
|
|
|
постоянной скоростью uG (рис. 2.3). |
|
Рис. 2.3 |
|
||

114 Глава 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Пусть в начальный момент времени t = 0 положение тел О и О' систем отсчета совпадают. При относительном движении систем отсчета радиус-векторы материальной точки в них, в момент време-
ни t определяются |
G |
|
G |
|
G |
|
|
|
|
|
|||
|
r |
′ = r |
− ut , |
|
||
|
G |
|
G |
|
G |
(2.10) |
G |
r |
= r′ |
+ ut , |
|||
|
|
|
|
|
|
|
где ut — перемещение системы X' Y' Z' по оси OX. |
|
|||||
Продифференцируем полученное соотношение |
|
|||||
|
drG |
|
drG' |
G |
|
|
|
|
= |
|
+ u , |
|
|
|
dt |
dt |
|
|||
|
G |
|
G |
|
G |
(2.11) |
|
υ = υ′ + u . |
|||||
Равенство (2.11) называется правилом сложения скоростей. Ускорение материальной точки в системах отсчета, движущихся относи-
тельно друг друга прямолинейно с постоянной скоростью |
|
||||
|
G |
|
G |
|
|
|
dυ |
= |
dυ′ |
, |
(2.12) |
|
dt |
dt |
|||
|
|
|
|
||
aG = aG′.
Силы, действующие на м. т. сGмассой m в движущихся относительно друг друга системах отсчета F = maG, F ' = maG' . Из-за равенства ускорений следует, что эти силы равны. Следовательно, законы динамики не изменяются при переходе от одной системы к другой, а система отсчета, находящаяся в покое или движущаяся равномерно и прямолинейно относительно инерциальной системы, сама является инерциальной. Рассмотрим другой случай, когда система X' Y' Z' движется относительно системы X, Y, Z со скоростью изменяющейся со временем u (t). В соответствии с правилом сложения скоростей
|
G |
G |
G |
(2.13) |
|||
|
υ = υ '+ u(t) . |
||||||
Продифференцируем последнее равенство по времени |
|||||||
|
G |
G |
|
|
G |
|
|
|
dυ |
= |
dυ′ |
|
+ |
du |
; |
|
|
|
|
dt |
|||
|
dt |
dt |
|
|
|
||
aG = aG′ |
+ aG |
|
, |
|
(2.14) |
||
aG′ = aG |
0 |
|
|
|
|||
− aG |
|
, |
|
|
|||
|
|
|
0 |
|
|
|
|
2.6. Принцип относительности Галилея. Неинерциальные системы отсчета |
115 |
где а0 — ускорение движущейся системы отсчета, a' — ускорение материальной точки в движущейся системе отсчета. Ускорение материальной точки в системах отсчета, движущихся относительно друг друга с изменяющейсяG скоростьюG неодинаково, и, следовательно, неодинаковы и силы F , F ' , действующие на нее.
Если обозначить силу, действующую на материальную точку мас- |
||||
сой m через FG |
, то в системе X' Y' Z' ее ускорение |
|
||
|
aG′ = |
FG |
− aG . |
(2.15) |
|
|
|||
|
|
m |
0 |
|
|
|
|
|
|
При умножении левой и правой части последнего равенства на
m получим |
G |
G |
G |
|
|
||||
|
ma' |
= F |
− ma , |
|
где при FG = 0 |
|
|
0 |
|
maG' = −maG , |
||||
|
||||
|
|
|
0 |
|
aG' = −aG0 . G
Из последних соотношений следует, что при отсутствии силы F , материальная точкаG в движущейся системе все равно будет двигаться с ускорением −a0 , т. е. так, как если бы на нее действовала сила. Эта сила Fин = −ma0 называется силой инерции.
Систему отсчета, движущуюся с ускорением относительно инерциальной системы, называют неинерциальной.
Для неинерциальных систем отсчета справедливо соотношение
|
|
|
(2.16) |
ma |
′ = F |
+ F . |
|
|
|
ин |
|
Вопросы и задания для самопроверки
1.Сформулируйте принцип относительности Галилея.
2.Дайте определение неинерциальной системы отсчета.
3.Определите ускорение материальной точки в неинерциальной системе отсчета при действии на нее внешней силы и в отсутствии ее.
4.Запишите правило векторного сложения скоростей.
5.Запишите правило векторного сложения ускорений для материальной точки в системах отсчета, движущихся относительно друг друга с ускорением.
116 |
Глава 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ |
2.7.СИЛЫ В МЕХАНИКЕ
2.7.1.Силы гравитационного взаимодействия
Гравитационное взаимодействие проявляется в притяжении друг к другу тел. Объясняется это взаимодействие наличием гравитационного поля вокруг каждого тела.
Модуль силы гравитационного взаимодействия FG между двумя материальными точками определяется законом всемирного тяготения
F |
= F |
= F |
= G |
m1m2 |
, |
(2.17) |
|
r2 |
|||||||
G |
1,2 |
2,1 |
|
|
|
где F1,2, F2,1 — силы взаимодействия, направленные вдоль прямой, соединяющей материальные точки (см. п.2.5), G = 6,67 · 10–11 Нм2/кг2 — гравитационная постоянная, m1, m2, r — массы точек и расстояние между ними.
Закон всемирного тяготения справедлив не только для материальных точек, но и для тел со сферически-симметричным распределением масс, а также тел произвольной формы, размеры которых во много раз меньше расстояний между ними.
Сила тяжести
Если принять одно из взаимодействующих тел Землю, а второе — тело с массой m, находящееся вблизи или на её поверхности, то тело притягивается с силой
F = G M32m , (2.18)
R
3
где M3, R3 — масса и радиус Земли.
Соотношение G M23 в формуле (2.18) есть постоянная величина
R 3
g = G M3 = 9,8 м/с2,
R32
имеет размерность ускорения и называется ускорением свободного падения.
Сила тяжести — сила гравитационного притяжения Землей тела массой m

2.7. Силы в механике |
|
|
|
|
117 |
|
|
= mg |
. |
(2.19) |
|
|
F |
||||
G |
тяж |
|
|
|
|
модуль |
|
|
зависит от географической ши- |
||
В отличие от силы FG |
Fтяж |
|
|||
роты |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
тяж = mg, а на |
|
экваторе уменьшается на 0,36 %. Это различие обусловлено тем, что Земля вращается вокруг своей оси и образует неинерциальную систему отсчета.
С удалением тела относительно поверхности Земли на высоту h уменьшается сила тяжести
|
|
|
|
|
|
= mgn = |
G M3 m |
||
|
|
|
|
|
|||||
где, g |
= |
G M3 |
|
Fтяж |
|
(R3 + h)2 |
, |
||
|
|
||||||||
— ускорение свободного падения на высоте h от |
|||||||||
(R3 + h)2 |
|||||||||
Земли.h |
|
|
|
|
|
|
|
||
Масса в формулах (2.17–2.19) характеризует гравитационное взаимодействие тел, является его мерой и называется гравитационной. В настоящее время с высокой точностью установлено равенство инертной (см. 2.2) и гравитационной масс тела, поэтому их не различают и обозначают одной буквой m.
|
Силы реакции |
|
|
|
Если подвесить тело |
|
подвес |
|
|
или положить его на не- |
|
|
|
|
подвижную опору, оно |
|
G |
|
|
будет покоиться отно- |
|
Т |
|
|
|
|
|
G |
|
сительно Земли, так как |
G |
|
G |
N |
|
|
|||
сила тяжести уравнове- |
N |
|
N |
|
|
mgG |
|
|
|
шивается силой реак- |
G |
опора |
|
|
ции, действующей на |
mg |
G |
mg |
|
опора |
mg |
|
||
тело со стороны опоры |
|
Рис. 2.4 |
|
|
или подвеса. |
|
|
|
|
|
|
|
|
|
Сила реакции — сила, с которой действуют на данное тело другие |
||||
тела, ограничивающие его движениеG. |
|
|
|
|
Сила нормальной реакции опоры N приложена к телу и направле- |
||||
на перпендикулярно плоскости опоры. |
|
|
|
|

118 |
Глава 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ |
Сила реакции нити (подвеса) TG приложена к телу и направлена вдоль нити (подвеса) (рис. 2.4).
|
Вес тела QG |
|
|
|
|
|
|
Вес тела |
|
|
|
|
|
|
|
|
||||||||||||
|
— сила, с которой тело давит на опору или растягива- |
|||||||||||||||||||||||||||
ет нить подвеса и приложена к опоре или подвесу. |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
В соответствии с третьим законом Ньютона QG = − NG, |
|
QG |
|
= |
|
NG |
|
|
, |
||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||
G |
G |
|
G |
= |
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q = −T , |
|
Q |
T |
. Вес тела численно равен силе тяжести в том слу- |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чае, когда тело находится на гори- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зонтальной поверхности опоры в |
||||||||||||||
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
состоянии покоя или равномерно- |
||||||||||||||
|
|
|
G |
|
|
|
G |
|
|
|||||||||||||||||||
|
|
|
|
G |
|
|
G |
го прямолинейного движения. G |
|
|||||||||||||||||||
|
|
|
|
N1 |
|
|
N 2 |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
a |
|
|
|
|
a |
|
Возможны случаи, |
когда |
Q |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
больше или меньше |
Fтяж и даже |
|||||||||||||
|
|
|
|
|
G |
|
|
|
G |
|
когда |
G |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Q |
= 0. Рассмотрим тело, |
|||||||||||||||||||
|
|
|
|
|
Fтяж |
|
|
Fтяж |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
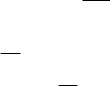
находящееся в лифте, движущем- |
|||||||||||||||||||||
|
Движение |
|
|
Движение |
|
ся с ускорением (рис. 2.5). |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
вниз |
|
|
|
вверх |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
Рис. 2.5 |
|
|
На тело действуют две силы: ре- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
акции опоры N и сила тяжести F . |
||||||||||||||
Запишем второй закон Ньютона |
|
|
|
|
|
|
|
|
|
|
|
тяж |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
(2.20) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ma |
N + F . |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
тяж |
|
|
|
|
|
|
|
|
|||||
|
При движении с ускорением a вверх равенство (2.20) с учетом |
|||||||||||||||||||||||||||
знака векторов сил и ускорения на ось X имеет вид
ma = N1 – Fтяж = N1 – mg,
а при движении вниз
–ma = N2 – Fтяж = N2 – mg,
где N1 и N2 — силы реакции опоры. Из последних равенств следует, что
N1 = m (g + a), N2 = m (g – a).
Согласно определению веса тела Q1 = N1 и Q2 = N2 имеем при ускоренном подъеме тела Q1 > Fтяж, а при ускоренном спуске Q2 < Fтяж.
При спуске с ускорением a = g, Q = 0, тело находится в состоянии невесомости.
2.7. Силы в механике |
119 |
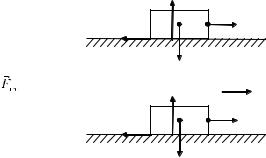
2.7.2. Силы трения
Сила трения — результат взаимодействия поверхностей соприкасающихся тел.
Сила трения направлена по касательной к трущимся поверхностям в сторону, противоположную направлению относительного движения взаимодействующих тел.
Различают внешнее (сухое) и внутреннее (вязкое) трение. Внешнее сухое трение возникает при относительном перемещении
двух соприкасающихся тел и делится на:
— трение покоя; |
|
G |
|
|
|
|
N |
|
а |
||
— трение скольжения; |
G |
||||
|
|
||||
— трение качения. |
|
G |
F |
|
|
Перечисленным видам внеш- |
Fтр.п |
|
|
||
|
|
|
|||
него трения соответствуют силы: |
mgG |
|
|
||
покоя, скольжения, качения. |
|
|
|||
G |
G |
|
|||
Сила трения покоя |
действу- |
|
|||
N |
υ |
б |
|||
ет между соприкасающимися по- |
|
||||
|
|
|
|||
верхностями взаимодействующих |
G |
|
F Fтр. max |
||
тел, когда величина внешних сил |
Fтр |
|
|||
|
|
|
|||
недостаточна, чтобы вызвать их |
mgG |
|
|
||
относительное перемещение. |
|
|
|||
|
|
|
|||
Если к телу, находящемуся в |
Рис. 2.6 |
|
|
||
соприкосновении с другим телом, |
|
|
|
||
приложить возрастающую внешнюю силу F, параллельную плоскости соприкосновения (рис. 2.6а), то при изменении F от нуля до некоторого значения Fтр. max движения тела не возникает, что свидетельствует о неоднозначности силы трения покоя.
Максимальная сила трения покоя
Fтр. max = μ0N,
где μ0 – коэффициент трения покоя, N — модуль силы нормальной реакции опоры.
Коэффициент трения покоя μ0 можно определить экспериментально. Например, μ0 = tgα, где α – угол наклона к горизонту поверхности опоры, с которой начинает скатываться тело под действием его силы тяжести.

120 Глава 2. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
При F > Fтр. max происходит скольжение тел относительно друг дру-
га с некоторой скоростью υ (рис. 2.6б). |
G |
|
|
Сила трения скольжения направлена против скорости υ . Модуль |
|
силы трения скольжения при малых скоростях движения вычисляется в соответствии с законом Амонтона по формуле
Fтр = μN, |
(2.21) |
где μ — безразмерный коэффициент трения движения, зависящий от материала и состояния поверхности соприкасающихся тел, и всегда меньше μ0.
Сила трения качения возникает тогда, когда тело, имеющее форму цилиндра или шара, катится по поверхности опоры. Численное значение силы трения качения определяется в соответствии с законом Кулона по формуле
Fтр.к = k ,
где k — коэффициент трения качения имеет размерность длины и зависит от материала соприкасающихся тел и состояния их поверхностей, R — радиус катящегося тела.
Х |
Сила внутреннего трения воз- |
|
никает между слоями одного и |
||
х |
||
того же сплошного тела (жид- |
||
υ |
кости или газа). Силы внут- |
|
0 |
реннего (вязкого) трения зави- |
|
|
сят от относительной скорости |
|
|
смещения отдельных слоев газа |
|
Рис. 2.7 |
или жидкости друг относитель- |
|
|
но друга. Например, вязкое тре- |
ние возникает при течении жидкости или газа по трубам со скоростью υ (рис. 2.7).
Скорость слоев жидкости уменьшается при приближении их к стенкам трубы. Отношение разности скоростей Δυ в двух близких слоях, расположенных на расстоянии x, называется средним градиентом скорости.
В одномерной задаче, когда υ = υ(х), средняя сила внутренне-
го трения |
|
|
|
|
Fвн.тр = η s |
υ |
, |
(2.22) |
|
x |
||||
|
|
|