

6.5.12. Коррекция перемещений.
Коррекция перемещений (адрес L) служит для изменения траектории движения инструмента и для приведения вершин режущих лезвий всех инструментов, закрепленных в резцовой головке, к одной точке в пространстве при: выборе инструмента по программе, при износе или установке новых инструментов.
Величины коррекций для каждого инструмента набираются вручную при наладке станка на декадных переключателях УЧПУ. Эти величины считываются в кадрах, содержащих адрес L и суммируются с содержащейся в кадре геометрической информации.
Система позволяет задавать смещение (коррекцию) инструмента по одной из осей (X или Z) или одновременно по двум осям. 16
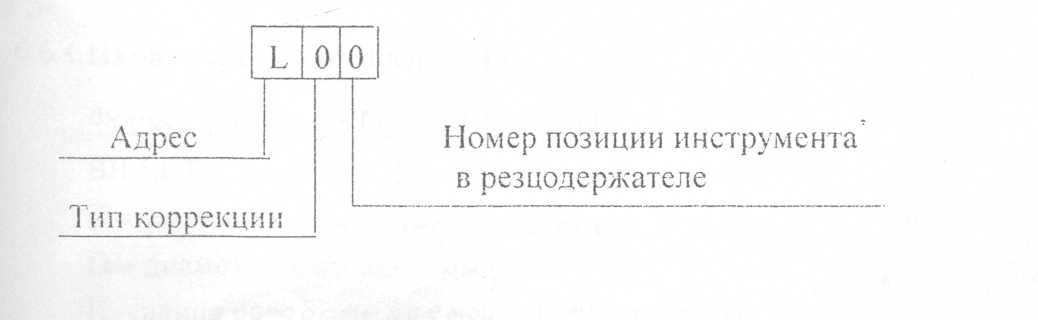
Типы коррекций: 1 - по оси X, 2 - по оси Z,. 3 - по осям X и Z.
Минимальная величина коррекции по оси X - 0,005мм, по оси Z - 0,01 мм (одна дискрета).
Максимальная величина коррекции - "+" или "-" 9999дискрет.
Например: L21 - смещение инструмента из первой позиции в резцедержателе по оси Z.
6.6.Структура управляющих программ в системе
ТИГРАС.
В системе ТИГРАС управляющая программа разрабатывается с помощью компьютера в диалоговом режиме.
Программа ТИГРАС позволяет строить чертежи обрабатываемых деталей с помощью команд, содержащихся в меню программы. В подменю "Именованная геометрия" можно задавать в координатах X и Z прямые, окружности, кривые и т.д. ТИГРАС позволяет преобразовывать и использовать чертежи, сделанные с помощью других программ или начерченные от руки с помощью подменю "Неименованная геометрия". Контуры детали обводят кривыми (Kl, K2, КЗ и т.д.). Эти кривые в системе ТИГРАС имеют особое значение; по ним (в технологической части программы) определяется траектория движение инструмента.
17
Основные этапы разработки программы.
6.6.1.Параметры заготовки - stk.
Формат команды: STK BILLET Z D L
BILLET - заготовка в форме прутка;
Z- припуск по торцу, измеряемый по оси Z от точки А, мм;
D - диаметр заготовки, мм;
L – длина обрабатываемой части заготовки, мм.
6.6.2. Команды для задания положения оснастки.
СHU - положение кулачков, HOL - зажим и разжим кулачков, TAI - положение задней бабки, TSB - отвод и подвод задней бабки, CEN - отвод и подвод центра. Эти команды не рассматриваются подробно в данном пособии, так как в системе ЧПУ станка 16К20ФЗС5 не предусмотрено программирование таких операций.
6.6.3. Выбор инструмента - ТОО.
Программа имеет базу наиболее часто используемых инструментов (подменю "Технология"). При необходимости эта база может пополняться пользователем.
Команда ТОО определяет выбранный из базы инструмент и номер позиции резцовой головки на станке, где этот инструмент будет закреплен. Например: Т001 - выбранный резец должен быть установлен в первой позиции резцедержателя станка; Т004 -используется инструмент из четвертой позиции и т.д.
Если в процессе обработки происходит смена инструмента, то по команде ТОО инструмент возвращается в точку смены инструмента (FRO) и команда возврата в «0» станка (GOH) не обязательна.
В процессе работы инструмент изнашивается, поэтому для избежания погрешностей в размерах заготовки, применяется команда СОМ - коррекция инструмента. После выбора станком инструмента (команда ТОО) по команде СОМ программное управле-
18
ние станка обращается к декадным переключателям станка и считывает численное значение коррекции, суммируя ее с основной геометрической информацией по ходу обработки. Например СОМ 2 - коррекция инструмента из второй позиции, СОМ 6 - коррекция инструмента из шестой позиции и т.д.