

Лист №4
IV. Проектирование кинематической схемы планетарного редуктора и построение картины эвольвентного зацепления зубчатых колёс
Содержание задания:
1. По передаточному отношению, модулю т, учитывая условия соосности, соседства и равных углов между сателлитами, подобрать числа зубьев всех колёс планетарного механизма заданной схемы, считая что Zmin>17 и колёса нулевые.
2. Рассчитать начальные диаметры и вычертить схему механизма в двух проекциях.
3. Построить картину скоростей и план угловых скоростей механизма (редуктора).
4. Рассчитать внешнее зацепление пары прямозубых колёс эвольвентных профилей с неподвижными осями, нарезанных стандартной инструментальной рейкой модуля m. При выборе коэффициентов смещения рейки обеспечить отсутствие подреза ножек зубьев.
5. Построить картину эвольвентного зацепления. Изобразить по три зуба каждого колеса, линию и дугу зацепления, рабочие участки профилей зубьев.
6. Аналитически и по данным картины зацепления определить коэффициент перекрытия.
4.1 Описание схемы зубчатого механизма
На рисунке 4.1 изображена схема зубчатого механизма с планетарной ступенью. Механизм состоит из подвижного звена Н (водила), блока сателлитов Z2, опорного колеса Z3, зубчатого колеса Z1.
|
Наименование параметра |
Обозначение |
Единица |
Значения |
|
Угловая скорость коленчатого вала (зубчатого колеса 1) |
ω1 |
с-1 |
840 |
|
Передаточное отношение редуктора |
|
- |
3,1 |
|
Модуль зубчатых колес |
m |
мм |
2,0 |
|
Число сателлитов |
К |
- |
3 |
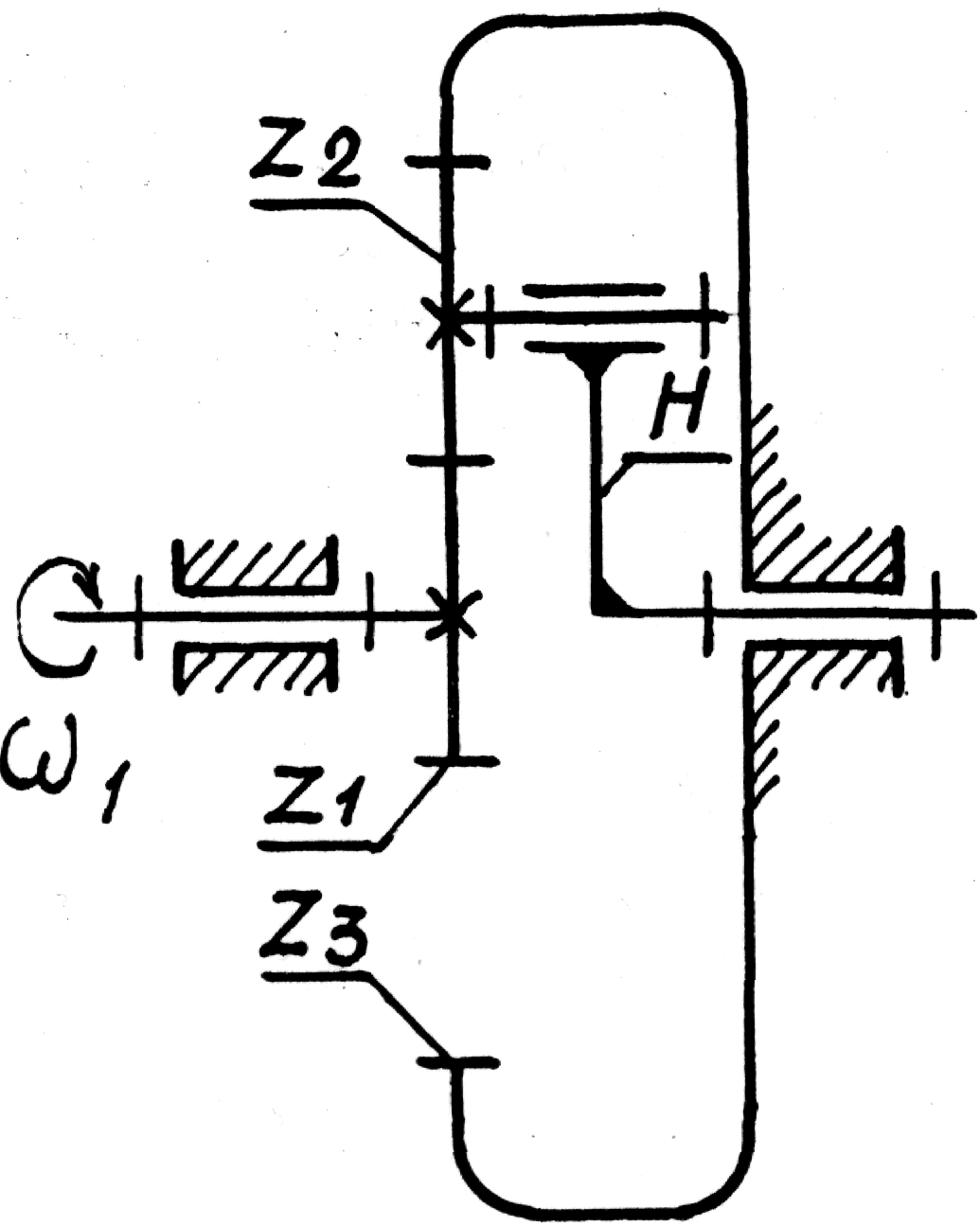
Рисунок 4.1 – Схема зубчатого механизма с планетарной ступенью
4.2 Подбор чисел зубьев планетарного редуктора
Подбор чисел зубьев планетарного редуктора проводим в такой последовательности.
Запишем формулу передаточного отношения планетарной ступени редуктора:
![]()
![]()
Запишем условие соосности для данного планетарного редуктора:
![]()
Определим число зубьев колеса Z3, Z2:
![]()
![]()
![]()
![]()
После подбора чисел зубьев планетарного редуктора проверяем данную схему на:
заданное передаточное отношение (с допустимой точностью);
условие соосности;
условие соседства (размещение нескольких сателлитов);
условие сборки (условие равных углов между сателлитами);
условие правильного зацепления.
1. Заданное передаточное отношение:
![]()
Расчетное передаточное отношение редуктора равно заданному.
2. Условие соосности:
![]()
Условие выполняется.
3. Условие соседства:
![]()
![]()
![]()
0,866>0,376
Условие соседства выполняется.
4. Условие сборки:
![]()
где К – число сателлитов;
С – целое число.
![]()
Условие выполняется.
5. Условие правильного зацепления:
![]()
Условие выполняется.
4.3 Построение схемы редуктора
Определяем радиусы делительных окружностей всех зубчатых колёс редуктора:

Выбираем масштабный коэффициент схемы редуктора
![]()
Тогда масштабные радиусы колёс определятся как частное от деления действительных радиусов колёс на масштабный коэффициент схемы редуктора

Строим кинематическую схему редуктора в указанном масштабе.
4.4 Построение картины скоростей и плана
угловых скоростей редуктора
Для построения картины скоростей проводим линию ординат и проектируем на неё все характерные точки редуктора.
Определяем скорость точки А, принадлежащей колёсам 1 и 2
(слитная точка):
![]()
Определяем масштабный коэффициент картины скоростей :
![]()
От точки А откладываем отрезок Аа = 50 мм, изображающий вектор скорости точки А колеса 1. Соединяя точку а с точкой О (скорость точки О равна нулю), получим прямую 1, которая является линией распределения скоростей колеса 1.
Переходим к колесу 2. У этого колеса известны скорость точки А (она такая же как и скорость точки А колеса 1) и скорость точки С (её скорость равна нулю ). Поэтому, соединяя точки а и С получим прямую 2, которая является линией распределения скоростей колёса 2
Переходим к водилу Н. Из точки В проведём горизонтальную прямую до пересечения с линией распределения скоростей 2. Получим точку b - конец отрезка скорости оси сателлита 2. Одновременно это скорость оси водила Н. Соединяя точки b и О; (скорость точки О равна нулю - ось вращения водила), получим прямую Н, которая является линией распределения скоростей водила Н.
Для построения плана угловых скоростей определяем масштабный коэффициент:
![]()
Проводим прямую, перпендикулярную линии, и откладываем на ней отрезок 01 = 168 мм. Из точки 1 проводим луч, параллельный линии 1 картины скоростей, до пересечения с вертикальной прямой ОР. Из точки Р – полюса плана угловых скоростей проводим лучи, параллельные линиям 2, 3 и Н. Полученные отрезки 0-1, 0-2, 0-3 и О-Н пропорциональны соответствующим угловым скоростям:
![]()
С помощью плана угловых скоростей можно графически определить передаточное отношение редуктора:
![]()
Определим процент расхождения в расчётах:

Допустимая погрешность не должна выходить за пределы точности инженерных расчетов, которые составляют 6-8%.