

2.3 Определение уравновешивающей силы методом жесткого рычага н.Е. Жуковского. Проверка кинетостатического исследования механизма
В практических инженерных расчетах часто требуется определить уравновешивающую силу без определения реакций в кинематических парах. Тогда целесообразно с целью упрощения расчетов воспользоваться теоремой профессора Н.Е. Жуковского о жестком рычаге.
Основной смысл теоремы заключается в том, что алгебраическая сумма моментов всех внешних сил, действующих в механизме и приложенных в соответствующих точках повёрнутого на 90 градусов в любую сторону плана скоростей относительно полюса плана, равна моменту уравновешивающей силы, или иначе сумма моментов всех сил относительно полюса будет равна нулю. Сам же план скоростей рассматривается здесь как жесткий рычаг с опорой в полюсе Р. Действительно, если мы составим уравнение моментов, то уравновешивающая сила РУР будет единственной неизвестной в этой системе.
Как видно, определив уравновешивающую силу методом жёсткого рычага, мы тем самым сможем одновременно проверить правильность проведенного нами кинетостатического расчета.
Определим величину уравновешивающей силы методом жесткого рычага Н.Е. Жуковского и сравним её с величиной силы (или момента) полученной, в процессе кинетостатического расчёта.
Повернём план скоростей на 90 градусов против часовой стрелки (можно повернуть и по часовой стрелке) и построим его в масштабе μυ=0,2 Н/мм.
Перенесем все внешние силы, действующие на механизм, параллельно самим себе на план скоростей в те точки, которые соответствуют точкам приложения сил на схеме механизма.
К внешним силам
относятся веса звеньев – G2,
G3,
G4,
G5,
главные векторы сил инерции – ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
и величины сил давление газов на поршень
– Fв,
Fс.
,
и величины сил давление газов на поршень
– Fв,
Fс.
Составим уравнение моментов всех сил (внешних) относительно точки
Р - полюса плана скоростей. Плечи всех сил относительно полюса замеряем непосредственно на чертеже независимо от масштаба, в котором построен повернутый план скоростей, подставляя их значения в уравнение в миллиметрах. Обозначим величину плеча сил на рычаге Н.Е. Жуковского через h с индексом соответствующей силы.
Искомое уравнение будет иметь вид:
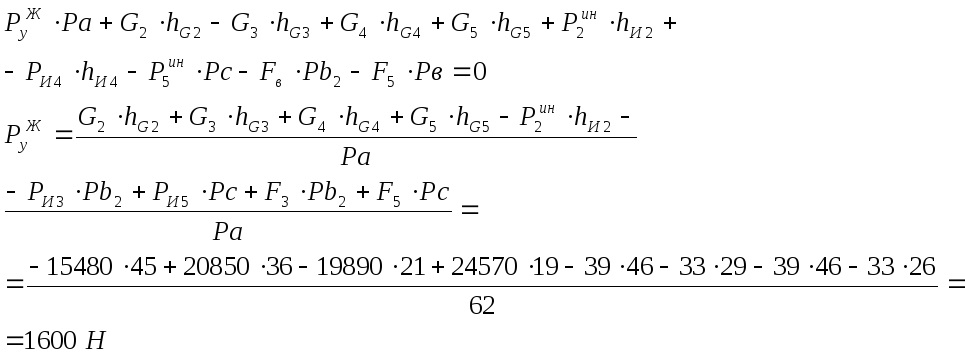
Сравним значение уравновешивающих сил, полученных методом планов сил и методом жесткого рычага Н.Е. Жуковского. Определим процент расхождения в расчетах:

Допустимая погрешность не должна выходить за пределы точности инженерных расчетов, которая составляет 6-7%.
Лист №3
III. Проектирование кулачкового механизма с плоским толкателем
Содержание задания.
1. Построить в произвольном масштабе заданный закон изменения второй производной перемещения толкателя по углу поворота кулачка
![]()
2. Методом графического интегрирования построить графики
![]()
3. Графически исключив параметр φ из графиков
![]()
построить
совмещенный график
![]()
Определить минимальный радиус кулачка.
4. Методом обращения движения построить практический (он же рабочий) профиль кулачка.