

1.6 Построение диаграммы перемещения s(t), скорости υ(t) и ускорения a(t) точки в ползуна 3
По оси t откладываем отрезок L=240 мм. Данный отрезок соответствует времени оборота кривошипа.
![]()
Делим отрезок L на 12 равных частей и получаем точки 0,1,…,11,12. Для построения диаграммы S(t) нужно из точек 0,1,…,11,12 отложить ординаты, соответствующие перемещению точки В. Полученные точки 1',…,11' соединяем плавной кривой.
Для построения диаграммы υ(t) воспользуемся методом дифференцирования (метод хорд). Криволинейные участки графика S(t), соответствующие интервалам оси t, заменяем хордами. Выбираем произвольной длинны полюсное расстояние Н1=36 мм. Из полюса P1 проводим лучи параллельные соответствующий хордам участков заданной кривой до пересечения с осью ординат. Из середины интервалов проводим перпендикуляры к оси абсцисс до пересечения с соответствующими линиями. Полученные точки 1'',…,11'' соединяем плавной кривой.
Масштаб оси υ равен:
![]()
Диаграмму a(t) построим аналогичным способом (методом хорд) путем дифференцирования диаграммы υ(t). Выбираем произвольной длинны полюсное расстояние Н2=45 мм.
![]()
Лист №2
II. Силовой (кинетостатический) расчет механизма.
Для кинетостатического исследования механизма строим кинематическую схему механизма во втором положении (перечерчиваем с первого листа). Масштабный коэффициент схемы
![]()
перечерчиваем с первого листа план скоростей в масштабе
![]()
и план ускорений в масштабе
![]()
2.1 Определение нагрузок на звенья механизма
Определим силы инерции и моменты от пар сил инерции, действующие на звенья механизма:
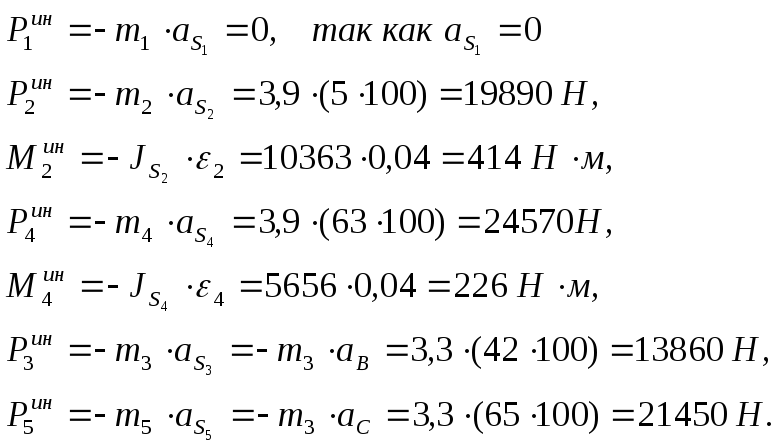
Силы
инерции РИ2
и РИ4
направляем в стороны противоположные
соответствующим ускорениям
![]() и
и![]() .
Момент
.
Момент![]() и
и
![]() прикладываем к звеньям 2 и 4 противоположно
условным ускорениям ε2
и ε4.
прикладываем к звеньям 2 и 4 противоположно
условным ускорениям ε2
и ε4.
Заданными внешними силами являются также силы веса звеньев, которые определяются по формуле:
G1=m1·g =16·10=160 Н,
G2=m2·g =3.9·10=39 Н,
G4=m4·g =3.3·10=33 Н,
G3=m3·g =3.9·10=39 Н,
G5=m5·g =3.3·10=33 Н,
Векторы сил тяжести прикладываем в центрах тяжести звеньев и направим вертикально вниз.
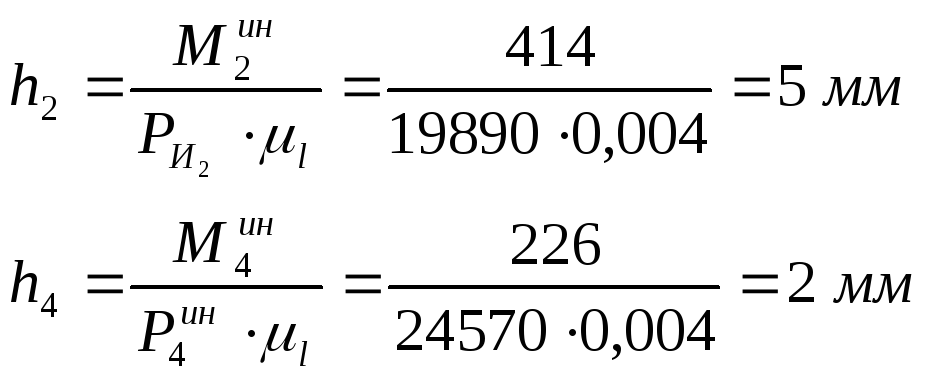
Для удобства
расчетов силу инерции ![]() и
момент
и
момент ![]() приведем к одной результирующей силе,
а также приведем к одной результирующей
силе момент
приведем к одной результирующей силе,
а также приведем к одной результирующей
силе момент
![]() и
силу инерции
и
силу инерции ![]() .
Для этого вычислим плечи сил h2
и h4
по формулам
.
Для этого вычислим плечи сил h2
и h4
по формулам
Силы давления газов на поршень:
Для поршней 3 и 5 строим диаграммы в масштабе
![]()
Поршень В совершает расширение, а поршень C совершает впуск, следовательно, давление в цилиндре равно атмосферному.
В зависимости от
![]()
![]()
В зависимости от
![]()
![]() -общий
ход ползуна В и С
-общий
ход ползуна В и С
![]()
Площадь цилиндров
![]()
![]() м
м
![]()
2.2 Определение реакций в кинематических парах механизма
Порядок силового расчета рассмотрим для второго положения механизма.
Силовой (кинетостатический) расчет начинается с наиболее удалённой от входного звена группы Ассура, т.е. производится в порядке обратном кинематическому расчету и заключается в последовательном рассмотрении условий равновесия (по принципу Даламбера) всех входящих в механизм групп.
2.2.1 Группа звеньев 4 – 5
Изображаем группу звеньев 4 – 5 в масштабе μL=0,004 м/мм.
Рассмотрим силы, действующие на группу звеньев 4 – 5.
В центре тяжести звеньев S4 и S5 приложены силы веса G4, G5, направлены вертикально вниз.
Силу инерции ![]() прикладываем в точке Т4
и направляем противоположно вектору
ускорения центра тяжести звена 4. Точку
Т4
находим, откладывая от направления
линии действия силы инерции PИ4
приложенной в центре тяжести S4,
плечо h4
таким образом, чтобы сила инерции
прикладываем в точке Т4
и направляем противоположно вектору
ускорения центра тяжести звена 4. Точку
Т4
находим, откладывая от направления
линии действия силы инерции PИ4
приложенной в центре тяжести S4,
плечо h4
таким образом, чтобы сила инерции ![]() ,
приложенная в точке Т4,
создавала момент относительно S4
того же направления, что и момент MИ4.
,
приложенная в точке Т4,
создавала момент относительно S4
того же направления, что и момент MИ4.
Силу инерции ![]() прикладываем в точке С и направляем
противоположно вектору ускорения центра
тяжести звена 5.
прикладываем в точке С и направляем
противоположно вектору ускорения центра
тяжести звена 5.
Сила ![]() (направлена
противоположно скорости точки С)
(направлена
противоположно скорости точки С)
Освобожденные связи заменяем реакциями.
В шарнире А со
стороны звена 1 действуют реакции связи.
Обозначим её R14.
Она не известна ни по величине, ни по
направлению. Для упрощения решения
задачи разложим эту реакцию на две
составляющие: нормальную
![]() направленную вдоль линииAС
звена 4, и касательную
направленную вдоль линииAС
звена 4, и касательную
![]() ,
направленную перпендикулярно линииAС
звена 4.
,
направленную перпендикулярно линииAС
звена 4.
Под действием всех
внешних сил, сил инерции и реакций связей
структурная группа находится в равновесии.
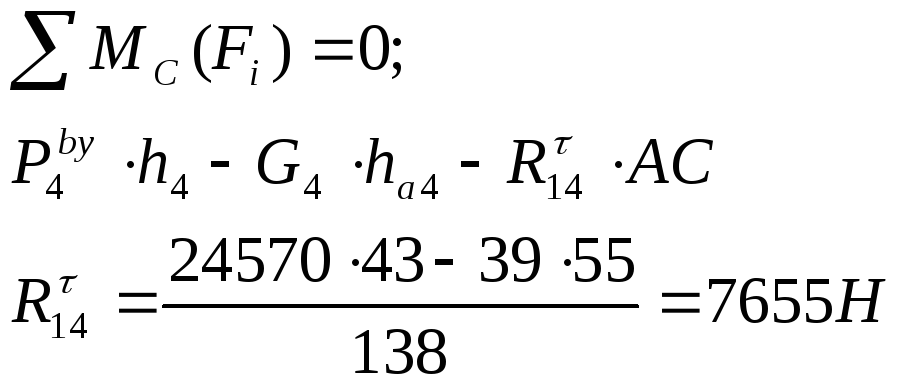
Исходя из условий равновесия, составим
уравнение моментов всех сил, действующих
на группу, относительно точки С (при
этом
![]() для
звена 4) и определим касательную
составляющую силы
для
звена 4) и определим касательную
составляющую силы![]() .
.
Будем считать моменты, действующие против часовой стрелки, положительными, а по часовой – отрицательными. Плечи сил определяются непосредственным замером на чертеже в миллиметрах и обозначаются буквой h с индексом соответствующей силы.
Исходя из условия равновесия звена 4 запишем:
Составим векторное
уравнение равновесия сил, действующих
на группу 4 – 5 (![]() ).
).
![]()
Полученное векторное уравнение имеет два неизвестных и может быть легко решено графическим методом, путем построения многоугольника сил. Равенство говорит о том, что этот многоугольник сил должен быть замкнутым.
Построение плана
сил начинаем с линии действия реакции
![]() ,
затем откладываем
из произвольной точки «1» на этой линии
в масштабе μР,
удобном для построения, все силы с
учетом их направления.
,
затем откладываем
из произвольной точки «1» на этой линии
в масштабе μР,
удобном для построения, все силы с
учетом их направления.
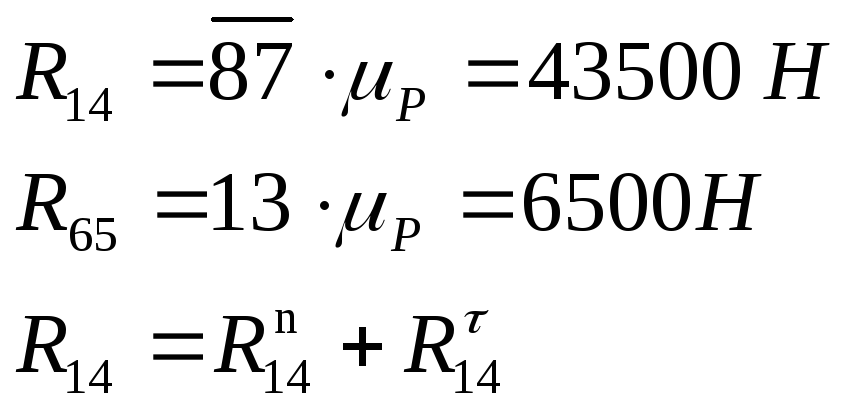
Принимаем масштабный коэффициент плана сил равным
μР=500 Н/мм.
Тогда масштабные (на чертеже) отрезки сил в миллиметрах определятся как частное от деления абсолютной величины силы на масштабный коэффициент, значения каждой силы в миллиметрах запишем в нижний строчке векторного уравнения (под значением силы в Ньютонах)
Затем строим по
порядку силы, геометрически складывая
их. Из конца последнего вектора
![]() проводим линию действия реакции
проводим линию действия реакции![]() и
соединяем линией действия реакции
и
соединяем линией действия реакции![]() .
.
Определим реакцию в шарнире C– R54. Для этого рассмотрим условие равновесия пятого звена:
Воспользуемся планов сил для звена 5.
![]()
![]()