

Динамические свойства преобразователей
При выборе преобразователей для измерения переменных во времени величин (давления, ускорения и т. п.) нужно помнить о погрешностях, связанных с динамическим режимом работы пре- образователей и обусловленных их инерционными свойствами.
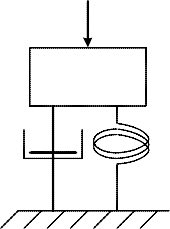
Общий вид модели измерительного преобразователя представлен на рис. 3.8.
 F(t)
F(t)
m
P W
A
Рис. 3.8. Физическая модель измерительного преобразователя:
F(t) – внешняя переменная сила; Р – демпфер (успокоитель); W – пружина
Внешняя переменная сила F(t) действует на массу m связан- ную с неподвижным телом А упругим элементом (например, пружиной W).
В преобразователях такого вида могут быть погрешности двух типов: амплитудная и фазовая.
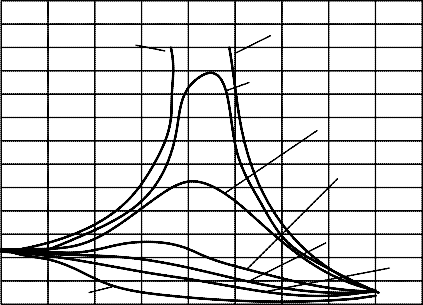
Амплитудная погрешность. Если к массе m приложена пе- ременная сила F(t), то при ее действии амплитуда колебаний мас- сы m оказывается больше по сравнению с амплитудой перемеще- ния ее при единичном воздействии силы. Исследования уравне- ниядвиженияподвижнойчасти преобразователей в динамиче- ском режиме, при синусоидальном законе изменения силы F(t), дали кривые зависимости∆=f(λ)(рис. 3.9).
Амплитудная погрешность вынужденных колебаний – откло- нение наибольшей амплитуды колебаний в динамическом режи- ме (вынужденные колебания) к амплитуде перемещения подвиж- ной части при единичном воздействии силы:
X max ä / X max åä.
Δ 5,5
5,0
4,5
4,0
3,5
3,0
2,5
2,0
1,5
1,0
0,5
β=1,0
β=0
 β=0
β=0,2
β=0
β=0,2
β=0,4
β=0,6
β=0,7
β=0,8
0 0,5 1,0 1,5 2,0 λ
Рис. 3.9. Амплитудная погрешность преобразователей
При синусоидальном колебании подвижной части амплитуд- ная погрешность:
2
![]() ,
,
2 12 42 2
где λ = ω/ω0 (ω, ω0 угловая частота вынужденных и собственных колебаний подвижной части соответственно); β – степень успоко- ения подвижной части.
Степень успокоения можно вычислить поформуле
P / Pêð ,
где Ркр – коэффициент успокоения при критическом режиме дви- жения массы, т.е. при наименьшем времени успокоения.
По графикам на рис. 3.9 видно, что максимальная амплитуд- ная погрешность имеет место при λ = 1, т.е. при резонансе (ω = ω0). Поэтому преобразователи перемещений и сил, работа- ющие в динамическом режиме, должны иметь λ = ω/ω0 много меньше единицы, т.е. должны иметь собственную частоту ω0 больше частоты измеряемого процесса ω.
Если собственная частота преобразователя ω0 будет меньше частоты измеряемого процесса ω, то деталь (масса m) может вы- ходить из соприкосновения с силой F и измерения будут невер- ные. На рис. 3.9 видно, что амплитудная погрешность ∆ зависит также от степени успокоения подвижной части преобразователя и имеет наименьшее значение при β=0,6...0,7.
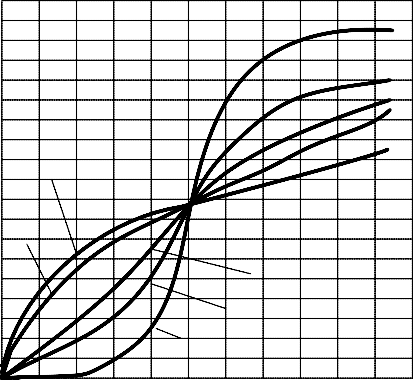
Фазовая погрешность. Фазоваяпогрешность выражается в запаздывании вынужденных колебаний подвижной части от ко- лебаний измеряемой величины (рис. 3.10).
 ψ
ψ
150
120
90
60
30
β=2,0 β=1,0
β=0,7 β=0,5
β=0,1
0 0,2 0,6 1,0 1,4 1,8 λ
Рис. 3.10. Фазовая погрешность преобразователей
Очевидно, что при β =0,7 изменение фазовой погрешности име- ет почти линейную зависимость от λ, а также ψ меньше при малом λ. Фазовая погрешность может быть вычислена по формуле
![]() arctg
2.
arctg
2.
2 1
Таким образом, при измерении переменных во времени ме- ханических величин во избежание больших амплитудных и фазовых погрешностей важно так подобрать параметры преоб-
разователя, чтобы обеспечить соответствующее соотношение частоты собственных колебаний преобразователя и частоты измеряемого процесса (вынужденных колебаний), а также сте- пень успокоения подвижной части преобразователя β = 0,6...0,7.
Погрешности системы преобразования. Основная погреш- ность прибора, состоящего из цепи измерительных преобразова- телей, складывается главным образом из двух составляющих:
инструментальной погрешности, обусловленной погрешно- стями элементов, входящих в каждое звено (например, погреш- ность подгонки сопротивлений, трение в подвижных частях ме- ханизма, недостаточная тщательность исполнения деталей звена);
погрешности из-за недостаточной чувствительности усили- теля и индикаторов.
Каждое из звеньев вносит свою долю в результирующую ос- новную погрешность прибора, причем при прямом преобразова- нии всезвенья равноправны в отношении степени влияния на общую погрешность. Поэтому всегда стремятся к уменьшению числа звеньев цепи преобразования.
Точность измерения неэлектрической величины зависит также и от ряда дополнительных факторов, которые необходимо учи- тывать. К ним относятся изменения величины напряжения, ча- стоты и формы кривой напряжения питания, изменение окружа- ющей температуры, влажности и вибрации.
Влияние дополнительных погрешностей можно оценить чув- ствительностью каждого звена к тому или иному влияющему фактору, т.е. отношением изменения выходной величины преоб- разователя данного звена к изменению дополнительного фактора (относительно его значения при градуировке).
Дополнительные факторы вызывают дополнительную состав- ляющую погрешности нуля и чувствительности прибора. Дей-
ствительно, изменение питающего напряжения вызывает появле- ние погрешности чувствительности во всех мостовых цепях (кроме равновесных мостов). В усилителях изменение питающего напряжения также вызывает некоторое изменение чувствитель- ности.
При изменении температуры изменяются жесткость упругих элементов, индукция постоянных магнитов, магнитные свойства ферромагнитныхматериалов. Кроме того, погрешность нуля и чувствительности прибора может быть вызвана изменением во времени параметров отдельных элементов схемы, шумами в эле- ментах схемы, наводкамипромышленной частоты и т.д.
Для уменьшения дополнительных погрешностей прибегают к стабилизации напряжения и частоты источников питания, к раз- ным приемам коррекции этих погрешностей и особенно заботят- ся о стабильности во времени физических свойств и параметров элементов прибора.
Кроме того, при анализе погрешностей сложных измеритель- ных устройств, состоящих из целого ряда самостоятельных зве- ньев, не всегда можно строго разграничить погрешности на си- стематические и случайные. Например, погрешность измерения от колебаний напряжения питающей сети с первого взгляда пред- ставляется систематической, так как на каждые ±10 % питающего напряжения прибор может иметь ±1 % изменения чувствительно- сти. Однако мгновенные изменения питающего напряжения сети происходят хаотически, и погрешность измерения, возникающая из-за этого, хотя и является однозначной функцией этого напря- жения, но будучи функцией случайной величины, представляет собой также случайную величину.
Это сильно затрудняет суммирование погрешностей измери- тельных устройств. Поэтому при анализе и выборе метода и сум- мирования погрешностей сложных измерительных устройств
следует подразделять погрешности не на систематические и слу- чайные, а по признаку их сильной или слабой взаимной корреля- ционной связи. Если ряд погрешностей одного или нескольких преобразователей вызывается одной общей причиной, в резуль- тате чего они оказываются сильно связаны между собой, то эти погрешности будут распределены по одному и тому же закону, а форма результирующего закона распределения будет также соот- ветствовать этому закону. Поэтому внутри каждой из этих групп погрешности должны складываться алгебраически с учетом их знака.
Результирующие погрешности, полученные после суммирова- ния в каждой из групп, уже не имеют между собой сильных кор- реляционных связей и должны рассматриваться как независимые и, следовательно, должны складываться геометрически.