

1.21.2. Аналитический и графический способы вырезания узлов
П
Рис. 1.52
Рассмотрим изображенную на рис. 1.52 плоскую ферму, загруженную сосредоточенными силами F1, F2, F3.
Рис. 1.52
Дано: F1 = 4 кН; F2 = 9 кН; F3 = 2 кН; a = 2 м; α = 300.
В этой ферме требуется определить реакции опор фермы, а также внутренние усилия Si в стержнях способом вырезания узлов. Дополнительно требуется определить реакции S7, S8, S9 в трех стержнях фермы способом Риттера.
Решение.
А. Определение реакций ra, xb, yb внешних связей
Порядок решения задач статики приведен в подразделе 1.7 данного пособия. Рассматривается равновесие всей фермы как абсолютно твердого тела. Как правило, выбирается правая система отсчета XOY. К ферме прикладываются активные силы F1, F2, F3. Отбрасывается связь в точке А. Так как к шарнирно неподвижной опоре в точке А присоединяется один стержень, который может быть или растянут или сжат, то линия действия реакции RA направлена вдоль стержня. К шарнирно неподвижной опоре в точке В подсоединяется три стержня, поэтому линия действия реакции RB заранее неизвестна и, следовательно, эту реакцию раскладывают на ее составляющие XВ, YВ по координатным осям.
Система внешних сил (F1, F2, F3, RA, XB, YB), действующих на ферму, плоская произвольная, поэтому аналитические условия ее равновесия выражаются тремя уравнениями:
Fix = 0 = – RA + XB – F1 = 0; (1)
FiY = YB – F2 – F3 = 0; (2)
MiB = 0 = RA(3a)tg + F1(2a)tg – F22a – F33a = 0. (3)
Решая эту систему уравнений, получим:
из уравнения (3) RА = (– F1(2a)tg + F22a + F33a)(3a)tg =
= (– 4220,577 + 922 + 232)320,577) = 11,198 кН;
из уравнения (1) XB = RA + F1 = 11,198 + 4 = 15,198 кН;
из уравнения (2) YB = F2 + F3 = 9 + 2 = 11,000 кН.
Если величины полученных реакций имеют знак плюс, то направление реакций внешних связей на чертеже показано правильно. При противоположном условии реакции направлены в другие стороны. Однако на чертеже исправления проводить не следует. В последующих расчетах значения реакций применяют с полученными знаками.
Б. Определение усилий в стержнях способом вырезания узлов
В
Рис. 1.53
Система сил (F3, S11, S12), действующая на узел, плоская сходящаяся. Аналитические условия равновесия такой системы сил выражаются системой уравнений:
∑ FiХ = 0 = – S12 – S11cosα =0; (1)
∑ FiY = 0 = – F3 + S11sinα =0. (2)
Р
Рис. 1.53
из уравнения (2)
S11 = F3/sinα = 2/0,5 = 4,000 кН;
из уравнения (1)
S12 = – S11cosα = – 4·0,866 = – 3,464 кН.
Так как значение S11>0, а значение S12<0, то стержень 11 растянут, а стержень 12 сжат.
Аналитический расчет сразу же следует проверить графическим построением замкнутого силового многоугольника. Система сил (F3, S11, S12) уравновешенная, поэтому силовой треугольник, построенный на силах F3, S11, S12, должен быть замкнут. Силовой треугольник строится в выбранном масштабе (см. рис. 1.53). Построение начинается с известной силы F3. На силовом многоугольнике определяется истинное направление реакций растянутых стержней. Графическая проверка подтвердила, что стержень 11 растянут, а стержень 12 сжат.
Графическую проверку рекомендуется выполнять сразу же после аналитических расчетов, так как этим устраняются ошибки в последующих расчетах.
Т
Рис. 1.54
Вырезанный узел находится в равновесии под действием сходящейся системы сил (F2, S12, S10, S9). Необходимо еще раз отметить, что реакции растянутых стержней направляются от узла. Аналитические условия равновесия вырезанного узла выражаются системой уравнений:
∑ Fix = 0 = – S9 + S12 = 0; (1)
∑ Fiy = 0 = – F2 + S10 = 0. (2)
Из уравнения (1) S9 = S12 = – 3, 464 кН <0;
из уравнения (2) S10 = F2 = 9,000 кН >0.
Таким образом, стержень 9 сжат, а стержень 10 растянут. Этот расчет проверяется графическим построением силового многоугольника (см. рис. 1.54).
Необходимо отметить, что построение силового многоугольника начинают с известных сил F2 и S12, а точка пересечения линий действия реакций S9, S10 определит их направление и модуль. При этом если известно, что стержень сжат (стержень 12), то его реакцию (S12) направляют к узлу.
Графическое построение подтвердило правильность проведенных расчетов.
Определение остальных реакций растянутых стержней проводится аналогичным способом. Результаты вычислений сводятся в таблицу.
Усилия в отдельных стержнях загруженной фермы могут оказаться нулевыми. Такие стержни принято называть нулевыми.
Рассмотрим леммы, пользуясь которыми можно определить нулевые стержни плоской фермы, не производя ее расчета.
Л
Рис. 1.55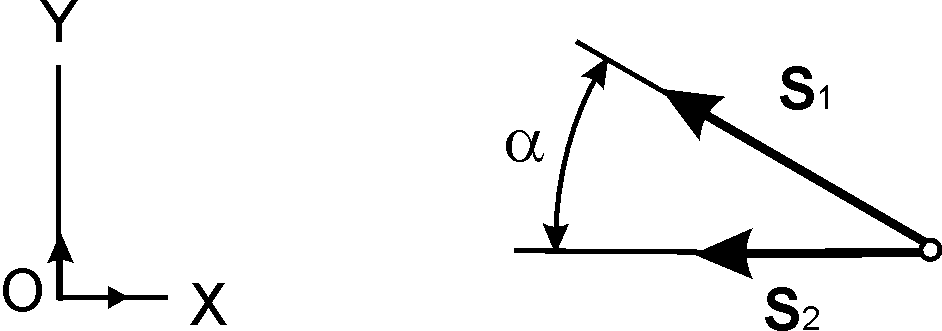
Л
Рис. 1.56
Рис. 1.56
Лемма 3. Если в узле плоской фермы сходятся два стержня и к узлу приложена внешняя сила, линия действия которой совпадает с осью одного из стержней, то усилие в этом стержне равно по модулю приложенной внешней силе, а усилие в другом стержне равно нулю (рис. 1.57).
Рис. 1.57