

4 Лабораторная работа №4
Моделирование системы Bluetooth
4.1 Цель работы
Изучение радиочастотной части для коротких расстояний беспроводной системы передачи данных Bluetooth
4.2 Предварительная подготовка
Изучить систему передачи данных Bluetooth
Bluetoothявляется недорогой маломощной технологией для построения радиосетей для небольших расстояний [1]. Эта технология была первоначально разработана для устранения кабельных соединений к электронным приборам таких, как беспроводные наушники.
Таблица 4.1 Спецификация системыBluetooth
-
Спецификация
Значение
Полоса частот
2.45 GHzполосаISM
Количество переключаемых каналов FH
23 или 79 в зависимости от страны
Скорость скачков FH
1600 скачков/с
Разнос каналов FH
1 МГЦ
Метод дуплексирования
TDD
Формат дуплекса
625 сек (1/1600 сек) вкл. и выкл
Формат модуляции
GFSK
GFSKBT
0.5
Модуляционная скорость передачи данных
1 MBps
Индекс модуляции
От 0.28 до 0.35
Система Bluetoothдолжна обеспечить возможность создания неболь-ших персональных сетей (PANPersonalAreaNetwork). СпецификацияBluetoothопределяет две системы радиосвязи, которые изучаются в этой лабораторной работе, а также стек протоколов. На рисунке 4.1 приведено сравнение между моделью взаимодействия открытых системISOи модельBluetooth.

Рисунок 4.1 Сравнение между моделью взаимодействия открытых системISOи модельBluetooth
Рассмотрим кратко функции системы Bluetoothуровни до части контроллера линков (LinkController).
Радио-часть, называемая BlueRFотвечает за радио-интерфейс, такой как модуляция, поскольку основная полоса частот отвечает за канальное кодирование и декодирование, низкий уровень управления синхронизацией и менеджмент линками пакетов данных. Контроллер линков откликается на команды более высокого уровня от менеджера линков и несет из операции уровня линка поверх несколько продолжительностей пакета данных как процесс установления соединения от пакета к пакету.
Bluetoothдолжен конкурировать с другими технологиями, как беспроводные локальные сети, поскольку он использует тот же самый свободный от лицензий спектрISM(индустриальный, научный и медицинский) 2.4 GHz, который, как ожидается, будет переполнен. Поэтому, этот метод, называемый расширением спектра с прыгающей частотой (FHSSfrequencyhoppingspreadspectrum), используется для устройствBluetooth, чтобы они могли соединиться между собой. Метод прыгающей частоты заключается в передаче сигнала данных в короткий промежуток времени или временной интервал (timeslot) на одной несущей частоте и передаче на другой несущей частоте в следующем временном интервале, как показано на рисунке 4.2. Перескок (hopping) может быть выполняться на уровне битов. Это означает, что каждый отдельный информационный бит может передаваться на различных несущих частотах. Для каждого переданного пакета устройствоBluetoothповторно настраивается на следующий радиоканал в последовательности перескоков (hopping); поэтомуBluetoothвыполняет перескок на уровне пакета. Для правильного приема данных получатель должен знать точную последовательность перескоков передатчика. Таким образом, синхронизация между передатчиком и приемником является критическим местом в связи с перескоком частот.

Рисунок 4.2 Метод расширения спектра перескоком частоты
Радиоканал Bluetoothявляется каналом с перескоком, в котором время между перескоками равно 625µsec [3]. УстройствоBluetooth, называемое мастер управления каналами с перескоками, определяет последовательность перескоков для всех других устройств называемых ведомыми (slaves). Полное дуплексное соединение между устройствами получается с помощью дуплексного разделения времени (TDDtimedivisionduplex). Ведущее устройство использует опрос для каждого слота ведущий-ведомый и решает, какому из ведомых устройств будет разрешена передача.Bluetoothиспользует модулятор гауссовской манипуляции (GFSKGaussianFrequencyShiftKeying), который генерирует положительное отклонение частоты, когда передается двоичная 1, и отрицательное отклонение частоты, при передаче двоичного 0. Наконец, рабочий диапазон составляет приблизительно от 10 м до 100 м в зависимости от передаваемой мощности от 0 dBm до 20 dBm. Наконец, рабочий диапазон составляет приблизительно от 10 м до 100 м в зависимости от передаваемой мощности от 0 dBm до 20 dBm.Радиочасть Bluetooth может быть выполнена на основе структур с нулевой промежуточной частотой (IF - Intermediate Frequency) или прямого преобразования, гетеродинной модуляции или модуляции отдельным битом, IQ модуляцией многоуровневых отсчетов, используя поисковые таблицы, и прямую передачу модуляции на передающий синтезатор. На рисунках 4.3 и 4.4 показаны пути передачи и приема, соответственно, простой гетеродинной системы с модуляцией отдельного бита. Вход передатчика и выход приемника подключены к уровню основной полосы частот.
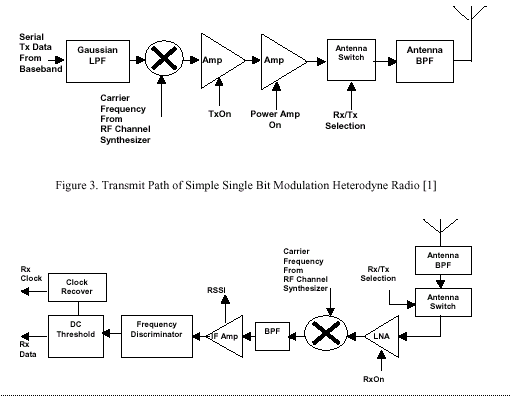
Рисунок 4.4 Путь приема простого радиоприемника с модуляцией
отдельного бита [1]
4.3 Порядок выполнения
Примечание.Хотя диапазон рабочих частот системы Bluetooth находятся в полосе 2.4GHz, намного более удобно и просто выполнить моделирование системы в диапазоне основной полосы частот. В нашем примере не используется модуляция передаваемого сигнала на частоте 2.4GHz.
4.3.1 Соберите систему в соответствии с рисунком 4.5, листом соединений (ConnectionList) и списком параметров системы (SystemSummary).

Рисунок 4.5 Схема моделирования системы Bluetooth
Генерация команд скачка частоты. Модули 1, 2, 3 и 4 генерируют частотные команды FH. Модуль 2 является генератором однородного набора случайных чисел в диапазоне от 0 до 79·106(79 частот и разнос1 МГц). Выходной сигнал этого модуля затем дискретизируется по скорости скачков, равной 1600 скачков/сек. Целая часть генерирует частотную команду скачков.
Генерация частотных данных. Сигнал от источника данных 1 MBps(модуль 6) поступает на гауссовский ФНЧ (модуль 7), установленный для создания ЛУ (BT), равного 0.5. Далее сигнал усиливается модулем 8 в 140000 раз. Это позваоляет получить желаемый индекс частотной модуляции 0.28.
Модулятор GFSK. Управляющий сигнал скачка частоты добавляется к сигналу данных, и композитный сигнал управляет модулятором на базе генератора, управляемого напряжением ГУН (модуль 0). ГУН установлен на номинальную частоту 10.7 МГц. При демодуляции сигнала все скачки сводятся к этой промежуточной частоте.
Управление TDD.УправлениеTDDдостигается обнулением выхода модулятора. Период сигнала прямоугольной формы (модуль10) устанавливается равной 1.25 мс. Он включается на 625 мкс и затем отключается на 625 мкс.
Демодуляция скачков частоты.Команды скачков частоты используются для управления ГУН (модуль14). Выход ГУН смешивается с полученным сигналом СПЧ. Разностная частота равна 10.7 МГц промежуточной частоты, а суммарная частота устраняется полосовым фильтром (модуль16).
При Обработке.После операция восстановления сигнала перескока частоты, результирующий сигнал находится на 10.7 МГц. Трехполюсный БИХ-фильтр (модуль16) с полосой пропускания нижеFc, равной 9.7e+6 Гц, и вышеFc, равной 11.7e+6 Гц, используется как стандартный фильтр промежуточной частоты.
При Обработке. После операция восстановления сигнала перескока частоты, результирующий сигнал находится на 10.7 МГц. Трехполюсный БИХ-фильтр (модуль16) с полосой пропускания ниже Fc, равной 9.7e+6 Гц, и вышеFc, равной 11.7e+6 Гц, используется как стандартный фильтр промежуточной частоты.
Демодуляция ФАПЧ.Фазовая АПЧ (модуль11) используется, чтобы непосредственно демодулировать сигнал на 10.7 МГц промежуточной частоты. Модуль ФАПЧ имеет внутренний ФНЧ после фазового детектора для устранения суммарной частоты замкнутой цепи. Частота среза устанавливается на 4 МГц, который достаточно широка для передачи желаемого сигнал. Усиление модуляции устанавливается на 2e6. Это дает время реакции цепи, достаточное для демодулирования сигнала.
4.3.2 Выполните моделирование
Просмотрите входной и выходной модулированные сигналы в соответствующих окнах получателей сигналов (модули 15 и 13, соответственно).
4.3.3 Установите временные характеристики моделирования:
Start Time, μsec 0
Stop Time, μsec 81.915
No. of Samples 16384
Sample Rate, MHz 200
Система Bluetoothявляется дуплексной системой с временным разделением (TDDTimeDivisionDuplex). Продолжительность каждого слота составляет 62 μsec. Поэтому, время моделирования меньше длительности одного тайм-слотаBluetooth. Модуль управленияTDDв верхней части схемы ограничивает временной интервал для передатчика. Можно увеличить время моделирования, чтобы увидеть результат управленияTDDпутем установки времени останова, равной 120 μsec.
Запустите процесс моделирования и просмотрите изменения в выходном сигнале после окончания тайм-слота. После этого установите время останова снова равным 81.91 μsec.

Рисунок 4.6 Окно установки системного времени
4.3.4 Перетащите указатель динамического системного пробника, расположенного в правом нижнем углу окна проектирования, на модуль 6 (источник PN-последовательности). Это позволит просматривать выходной сигнал модуля во время проектирования.
Теперь запустите моделирование нажатием кнопки F5. Переведите кнопку "Time" (Время) динамического системного пробника в положение "Frequency" (Частота). Это переведет пробник в режим спектроанализатора. Обратите внимание, что максимальный частотный диапазон сигнала может быть равен 100MHz. Как это связано со скоростью дискретизацией, установленной при моделировании?
Подключите вход Bдинамического системного пробника к модулю 12. Переведите режим работы пробника в двухканальный режим, чтобы иметь возможность наблюдать два канала одновременно. После этого подключите входBпробника поочередно к модулям 16, 11, 19 и 20, чтобы просмотреть сигналы в этих точках схемы. Сравните параметры этих сигналов.
Закройте окно пробника после завершения процесса моделирования.
4.3.5 Модификация проекта
В данном пункте исследуется влияние аддитивного белого гауссовского шума (АБГШ или AWGNadditivewhiteGaussiannoise).Для этого необходимо добавить в схему модули сумматора и источника АБГШ, как показано на рисунке 4.7.

Рисунок 4.7 Установка источника помех (аддитивного белого гауссовского шума). Введенные элементы для наглядности показаны в увеличенном виде.
Установите параметры источника АБГШ следующими:
StdDeviation(v) 0,1
Mean0
Подключите динамический системный пробник к источнику АБГШ для того, чтобы можно было наблюдать форму АБГШ. Переведите пробник в режим анализатора спектра и сделайте вывод о свойствах АБГШ.
Измените параметры источника АБГШ на следующие:
StdDeviation(v) 0,5
Пронаблюдайте изменения в выходном сигнале приемника.
4.3.6 Изучение влияния изменения PN-последовательности
Разъедините модули 4 и 14. Продублируйте модули 1, 2, 3 и 4 вместе с относящимися к ним соединениям. Подключите вновь полученный генератор переключающей последовательности к модулю частотного модулятора 14. К выходам модулей 1 и 24 Fractionalподключите получателиSink-RealTime. Фрагмент схемы с вышеуказанными элементами приведен на рис.4.8.

Рисунок 4.8
Установите следующие временные параметры схемы:
No.ofSamples524288
Или
StopTime(sec) 2,621435e-3
Запустите процесс моделирования. Объедините графики сигналов модулей 22 и 23 (Sink-Realtime). Объясните полученные результаты.
|
|
|


Рисунок 4.9 Пример моделирования с разными источникамиPN-последовательности
4.4 Выводы
4.4.1 Сделайте анализ по полученным результатам
4.5 Контрольные вопросы
4.5.1 В чем заключается спецификация Bluetooth.
4.5.2 Функции системы Bluetooth.
4.5.3 Метод прыгающей частоты.
4.5.4 Объясните дуплексную систему с временным разделением (TDD Time Division Duplex).
4.5.5 Влияние аддитивного белого гауссовского шума (АБГШ или AWGN additive white Gaussian noise).