

Дуобинарное упражнение
Соберите систему:
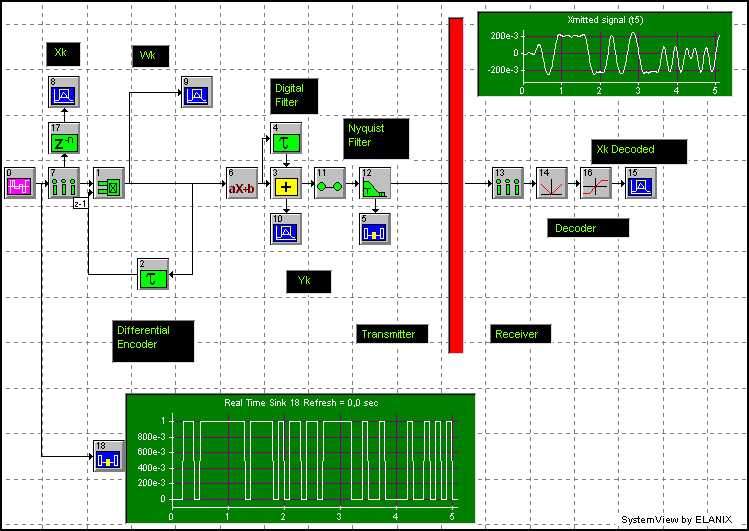
Рисунок 2.9
Filename:Duobinary_ru.svu
Title:Duobinary.svu
System Time:0 - 5,11e+0 sec, dT=1,0e-2 sec, Sample Rate=1,00e+2 Hz, Samples=512, Loops=1
Token Attribute Type Parameters
0 Source PN Seq Amp = 500e-3 v, Offset = 500e-3 v, Rate = 10 Hz, Levels = 2, Phase = 0 deg, Max Rate = 100 Hz
1 Operator XOR Threshold = 500e-3, True = 0, False = 1, Max Rate = 10
Hz
2 Operator Delay Non-Interpolating, Delay = 100e-3 sec, = 1,0 smp, Output 0 = Delay , Output 1 = Delay - dT t1 , Max Rate (Port 1) = 10 Hz
3 Adder - - - -
4 Operator Delay Non-Interpolating, Delay = 100e-3 sec, = 1,0 smp, Output 0 = Delay t3 , Output 1 = Delay - dT , Max Rate (Port 0) = 10 Hz
5 Sink Real Time Input from t12 Output Port 0, Max Input Rate = 100 Hz
6 Function Poly -1+(2x), Max Rate = 10 Hz
7 Operator Sampler Non-Interp Right, Rate = 10 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 10 Hz
8 Sink Analysis Input from t17 Output Port 0, Max Input Rate = 10 Hz
9 Sink Analysis Input from t1 Output Port 0, Max Input Rate = 10 Hz
10 Sink Analysis Input from t3 Output Port 0, Max Input Rate = 10 Hz
11 Operator Hold Zero, Gain = 1, Out Rate = 100 Hz, Max Rate = 100 Hz
12 Operator Linear Sys Comm Sin(t)/t FIR, Symbol Rate = 10 Hz, Decimate By 1, Quant Bits = None, Taps = 81, Init Cndtn = 0, DSP Mode Disabled, Max Rate = 100 Hz
13 Operator Sampler Non-Interp Right, Rate = 10 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 10 Hz
14 Function Rectify Zero Point = 0 v, Max Rate = 10 Hz
15 Sink Analysis Input from t16 Output Port 0, Max Input Rate = 10 Hz
16 Function Limiter Max Input = ±0 v, Max Output = ±1 v, Max Rate = 10 Hz
17 Operator Smpl Delay Delay = 4 samples, = 400e-3 sec, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t8 , Output 1 = Delay - dT , Max Rate (Port 0) = 10 Hz
18 Sink Real Time Input from t0 Output Port 0, Max Input Rate = 100 Hz
Выводы
2.7.1 Запустите схему с упражнением.
2.7.2 Поработайте над декодером символов, чтобы проверить критерии принятия того или иного решения задачи.
2.8 Контрольные вопросы
2.8.1 Чему равно частота дискретизация?
2.8.2 Раскажите теорему Котельникова.
На каких принципах основана дискретизая непрерывных сообщений по времени.
2.8.4 В каких устройствах она впервые нашла применение?
2.8.5 Какая разница между дискретизацией и квантованием непрерывных сообщений?
3 Лабораторная работа №3
Помехоустойчивое кодирование
3.1 Цель работы
Исследование помехоустойчивого кодирования
3.2 Предварительная подготовка
Изучить методы помехоустойчивого кодирования
Бурный рост теории и практики помехоустойчивого кодирования в последнее десятилетие связан в первую очередь с созданием средств телеобработки данных, вычислительных систем и сетей, региональных автоматизированных систем управления, систем автоматизации научных исследований. Высокие требования к достоверности передачи, обработки и хранения информации в указанных системах диктовали необходимость такого кодирования информации, которое обеспечивало бы возможность обнаружения и исправления ошибки.
В этом случае кодирование должно осуществляться так, чтобы сигнал, соответствующий принятой последовательности символов, после воздействия на него предполагаемой в канале помехи оставался ближе к сигналу, соответствующему конкретной переданной последовательности символов, чем к сигналам, соответствующим другим возможным последовательностям. (Степень близости обычно определяется по числу разрядов, в которых последовательности отличаются друг от друга.)
Это достигается ценой введения при кодировании избыточности, которая позволяет так выбрать передаваемые последовательности символов, чтобы они удовлетворяли дополнительным условиям, проверка которых на приемной стороне дает возможность обнаружить и исправить ошибки.
Коды, обладающие таким свойством, называют помехоустойчивыми. Они используются как для исправления ошибок (корректирующие коды), так и для их обнаружения.