

3. Кинематический расчёт механизма
3.1 План механизма при рабочем и холостом ходе
Рабочий ход коромысла отличается от холостого хода значением силы полезного сопротивления. При рабочем ходе точка Е шатуна движется вправо. В начале прямолинейного участка траектории точки Е шатун упирается в изделие . Обратный ход является холостым.
На рис. 3.1 представлена диаграмма сил полезного сопротивления.
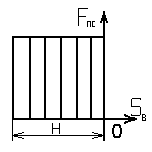
Рис. 3.1 Диаграмма сил полезного сопротивления
Для
определения линейных скоростей и
ускорений, для построения планов
скоростей и ускорений заданы размеры
звеньев и угловая
скорость кривошипа (табл. 1.1).
и угловая
скорость кривошипа (табл. 1.1).
Планы скоростей и ускорений строятся в последовательности, совпадающей с формулой строения механизма

Линейные
скорости точки А рассматриваются
относительно оси вращения
кривошипа О в
механизме
1 класса
 ;
; и линейныескорости
точки В
рассматриваются
относительно А и С в структурной группе
и линейныескорости
точки В
рассматриваются
относительно А и С в структурной группе
 .
.
3.2 План скоростей
3.2.1 План скоростей при рабочем ходе (положение 11) .
3.2.1.1 План скоростей для начального звена
Векторное уравнения скорости точки А:

где
 -
вектор линейной скорости точки О,
-
вектор линейной скорости точки О,
 ;
;
 -
вектор относительной скорости,
-
вектор относительной скорости,

т.е.
 .
.
Принимаем
длину вектора относительной скорости
на плане скоростей
 .
.
Находим масштабный коэффициент плана скоростей

3.2.1.2
План скоростей для структурной группы

Векторное уравнение скорости внутренней точки В

где
 - вектор
относительной скорости точки В
относительно А,
- вектор
относительной скорости точки В
относительно А,

 -
вектор
линейной скорости точки С,
-
вектор
линейной скорости точки С,
 ,
,
 -
вектор относительной скорости точки В
относительно точки С,
-
вектор относительной скорости точки В
относительно точки С,

Данная
система уравнений решается по правилам
векторной алгебры. Сначала
откладываются от полюса
 векторы
векторы и
и
 ,
из концов этих векторов проводится
линии действии вектором до их взаимного
пересечения. В их пересечении получим
точку
,
из концов этих векторов проводится
линии действии вектором до их взаимного
пересечения. В их пересечении получим
точку
 ,
соединим
ее с полюсом
,
соединим
ее с полюсом
 .
Проставляем направления векторов
абсолютной скорости
.
Проставляем направления векторов
абсолютной скорости (от полюса), относительных скоростей
(от полюса), относительных скоростей и
и
 в сторону замыкающей
точки
в сторону замыкающей
точки
 .
.
По
теореме подобия фигуры на плане звена
и фигуры на плане скоростей,
образованной векторами относительных
скоростей, находим положения точек
 ,
, ,
, на плане скоростей:
на плане скоростей:



Найденные
точки и соответствующие им векторы
отложим на плане скоростей, соединим
их полюсом плана скоростей
 .
.
3.2.1.3 Определение линейных и угловых скоростей.
Из плана скоростей находим значения абсолютных и относительных скоростей точек
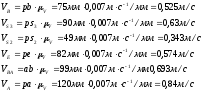
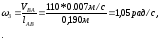
Угловая скорость шатуна

Мысленным
переносом векторов относительных
скоростей
 и
и
 в
точку В на плане
механизма определяем направление
угловой скорости шатуна :
в
точку В на плане
механизма определяем направление
угловой скорости шатуна :
 – против часовой стрелки.
– против часовой стрелки.
3.2.2 План скоростей для холостого хода (положение 2), лист 2
3.2.2.1 План скоростей для начального звена
Векторное уравнения скорости точки А:

где
 -
вектор линейной скорости точки О,
-
вектор линейной скорости точки О,
 ;
;
 -
вектор относительной скорости,
-
вектор относительной скорости,

т.е.
 .
.
Принимаем
длину вектора относительной скорости
на плане скоростей
 .
.
Находим масштабный коэффициент плана скоростей

3.2.2.2
План скоростей для структурной группы

Векторное уравнение скорости внутренней точки В

где
 - вектор
относительной скорости точки В
относительно А,
- вектор
относительной скорости точки В
относительно А,

 -
вектор относительной скорости точки В
относительно точки С,
-
вектор относительной скорости точки В
относительно точки С,

Данная
система уравнений решается по правилам
векторной алгебры. Сначала
откладываются от полюса
 векторы
векторы и
и
 ,
из концов этих векторов проводится
линии действии вектором до их взаимного
пересечения. В их пересечении получим
точку
,
из концов этих векторов проводится
линии действии вектором до их взаимного
пересечения. В их пересечении получим
точку
 ,
соединим
ее с полюсом
,
соединим
ее с полюсом
 .
Проставляем направления векторов
абсолютной скорости
.
Проставляем направления векторов
абсолютной скорости (от полюса), относительных скоростей
(от полюса), относительных скоростей и
и
 в сторону замыкающей
точки
в сторону замыкающей
точки
 .
.
По
теореме подобия фигуры на плане звена
и фигуры на плане скоростей,
образованной векторами относительных
скоростей, находим положения точек
 ,
, ,
на плане скоростей:
,
на плане скоростей:


Найденные
точки и соответствующие им векторы
отложим на плане скоростей, соединим
их полюсом плана скоростей
 .
.
3.2.1.3 Определение линейных и угловых скоростей.
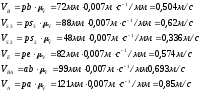
Из плана скоростей находим значения абсолютных и относительных скоростей точек
Угловая скорость шатуна
Мысленным
переносом векторов относительных
скоростей
 и
и
 в
точку В на плане
механизма определяем направления
угловых скоростей шатуна и коромысла:
в
точку В на плане
механизма определяем направления
угловых скоростей шатуна и коромысла:
 – по часовой стрелки,
– по часовой стрелки, – против часовой стрелки.
– против часовой стрелки.
Таблица 3.1
Скорости точек и звеньев механизма
|
№ поло- жения |
Ход меха- низма |
|
|
|
|
|
|
|
|
|
| |
|
м/с |
рад/с | |||||||||||
|
11 |
раб. |
0,84 |
0,525 |
0.63 |
0.343 |
0,574 |
0,525 |
0,693 |
3,684 |
0 |
18,9 | |
|
2 |
хол. |
0,85 |
0.504 |
0.62 |
0.336 |
0,574 |
0,525 |
0,693 |
1.05 |
0 |
18,9 | |









