

2. Кинематическое исследование кривошипно-ползунного механизма
Кинематический анализ механизмов заключается в исследовании движения звеньев механизмов при заданном законе движения начального звена. В результате этого анализа определяются положения звеньев и траектории отдельных точек звеньев; линейные скорости отдельных точек и угловые скорости звеньев; линейные ускорения отдельных точек и угловые ускорения звеньев.
2.1 Структурный анализ механизма
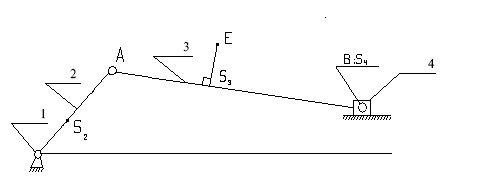
Рис. 2.1 Кинематическая схема кривошипно-ползунного механизма
По кинематической схеме механизма составляем таблицы его звеньев и кинематических пар.
Таблица 2.1
Звенья механизма
|
№ звена |
Название |
Обозначение |
Вид движения |
|
1 |
стойка |
|
неподвижное |
|
2 |
кривошип |
ОА |
вращательное |
|
3 |
шатун |
АВ |
плоское |
|
4 |
ползун |
AB |
возвратно-поступательное |
Таблица 2.2
Кинематические пары (КП) механизма
|
Обозначение |
Звенья составляющие КП |
Вид КП |
Название КП |
Класс КП |
|
А |
1-2 |
низшая |
вращательная |
5 |
|
О |
2-3 |
низшая |
вращательная |
5 |
|
В |
3-4 |
низшая |
вращательная |
5 |
|
П |
4-1 |
низшая |
поступательная |
5 |
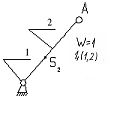
Механизм
имеет три подвижных звена (n=3)
и четыре одноподвижные кинематические
пары ( ).
).
Число степеней подвижности плоского механизма определяем по формуле Чебышева:

У механизма с одной степенью свободы одно начальное звено. За начальное звено принимаем кривошип, которому от электродвигателя через редуктор передаётся вращательное движение.
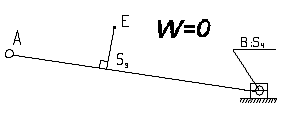

Оставшаяся
часть механизма (рис. 2.3) состоит из двух
звеньев (шатуна 3,
коромысла
4) и трёх вращательных пар (А, В, С), имеет
нулевую степень подвижности
 ,
является группой Ассура 2 класса 2 порядка
,
является группой Ассура 2 класса 2 порядка

Таким
образом, шарнирный рассматриваемый
четырёхзвенник является
механизмом второго класса и имеет
следующую формулу строения:
2.2 План положений механизма
Подбираем
масштабный коэффициент длин
 Находим
чертёжные размеры звеньев:
Находим
чертёжные размеры звеньев:

В неподвижной системе координат XOY размещаем элемент кинематическую пару О стойки 1. И неподвижную направленную Н4-1. Кинематическую пару О с началом координат. Из точки О проводим дугу окружности a-a радиусом ОА (рис.2.4).
При
построениях используется метод засечек.
Из точек О и С проводим
дуги окружностей радиусами ОА
и АВ.
Наиболее удалённо положение коромысла
 принимается за нулевое, а другое крайнее
положение
принимается за нулевое, а другое крайнее
положение -
за
второе крайнее, В этих положениях шатун
является
продолжением кривошипа (в нулевом
положении) или наложением на кривошип
(в конечном положении).
-
за
второе крайнее, В этих положениях шатун
является
продолжением кривошипа (в нулевом
положении) или наложением на кривошип
(в конечном положении).
Тогда
расстояния
 и
и равны:
равны:

Находим
точки
 и
и на дуге радиусаОВ
и
ОВк
на неподвижной направляющей Н4-1,соединив
которые с точкой О, получим крайние
положения ползуна 4 и шатуна 3
на дуге радиусаОВ
и
ОВк
на неподвижной направляющей Н4-1,соединив
которые с точкой О, получим крайние
положения ползуна 4 и шатуна 3