

4241, 4242(ТАУ-без MATLAB) / КР / ТАУ. МетодУказКВыпКурсРаб.МалПоля
.pdf3.12.1. Переходные характеристики
|
†y<x=. ПП 0,0713 *; |
:,[Q |
· 100% 7 % |
Рис. 3.31. ПХ для |
|
,: V:,[Q |
. |
Рис. 3.32. ПХ для †´ <x=. ПП 0,0609 *; 0,00287.
-71-
|
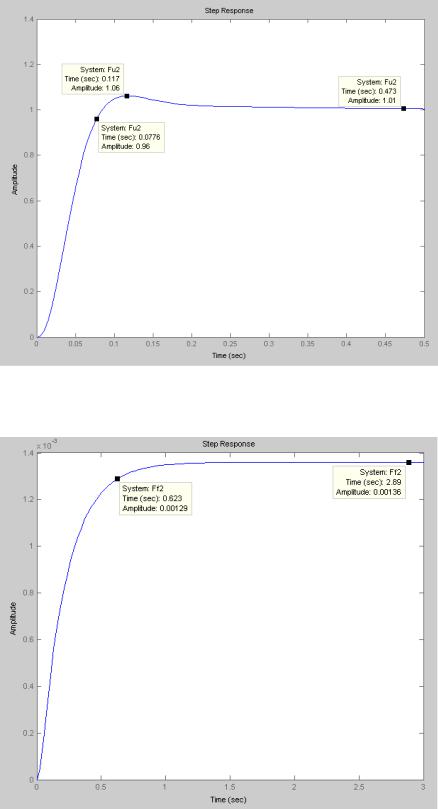
†y <x= ПП 0,0776 *; |
,: |
· 100% 5 %. |
Рис. 3.33. ПХ для |
. |
,:{V ,: |
|
Рис. 3.34. ПХ для †´<x=. ПП 0,623 *; 0,00136.
-72-
3.12.2. Амплитудно-фазовые частотные характеристики
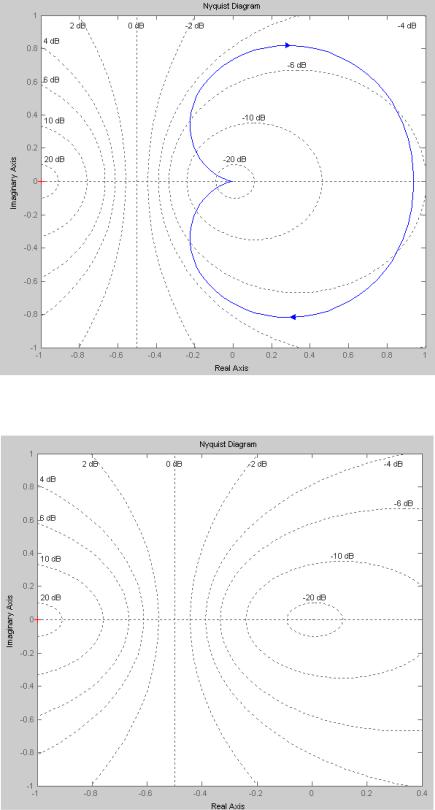
Рис. 3.35. АФЧХ для †y<x=.
Рис. 3.36. АФЧХ для †´<x=.
-73-
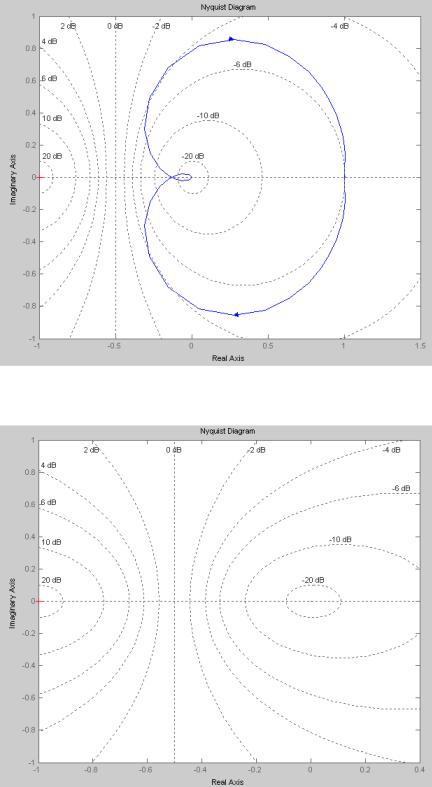
Рис. 3.37. АФЧХ для †y<x=.
Рис. 3.38. АФЧХ для †´<x=.
-74-
3.12.3. Логарифмические частотные характеристики
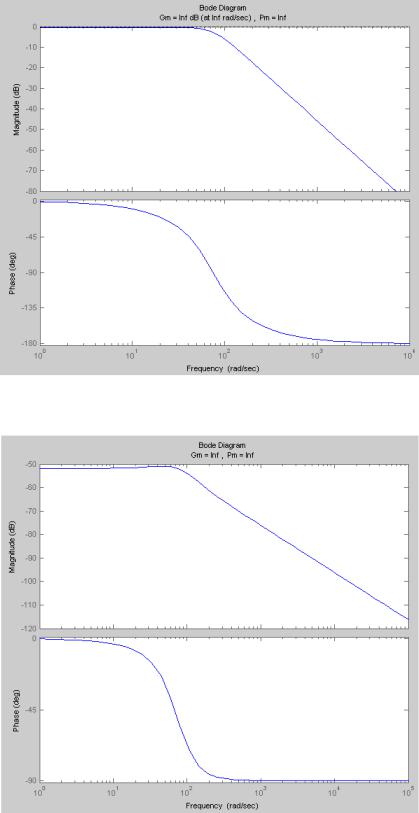
Рис. 3.39. ЛАФЧХ для †y<x=.
Рис. 3.40. ЛАФЧХ для †´<x=.
-75-
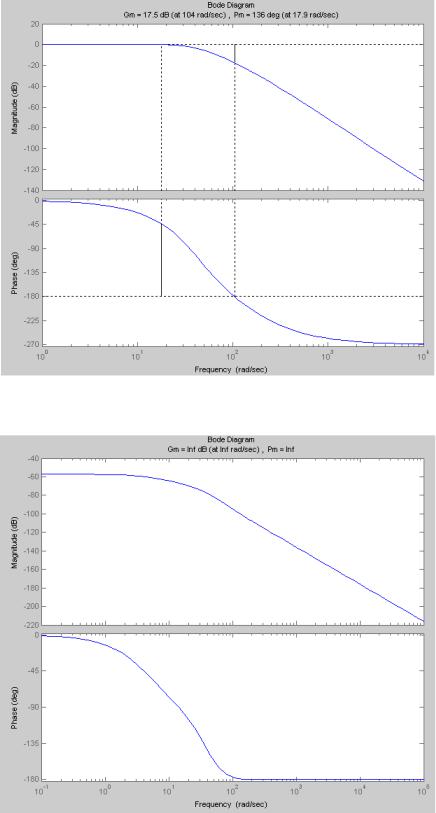
Рис. 3.41. ЛАФЧХ для †y<x=.
Рис. 3.42. ЛАФЧХ для †´<x=.
-76-

3.13.КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ ПРИВОДОВ В СРЕДЕ
SIMULINK
Процедура компьютерного моделирования привода в среде Simulink (симуляция привода) заключается в построении переходных характеристик этого привода по задающему воздействию и по возмущающему воздействию.
В работе по заданию требуется выполнить симуляцию частотного привода (см. Рис. 3.27) и позиционного привода (см. Рис. 3.29).
3.13.1. Симуляция частотного привода
На основании полученной структурной схемы в стандартном одноконтурном виде (см. Рис. 3.27) можно в среде Simulink собрать компьютерную модель частотного привода для построения переходных характеристик по задающему и возмущающему воздействиям.
В результате такого компьютерного моделирования в среде Simulink были получены: график переходной характеристики частотного привода по задающему воздействию (см. Рис. 3.43) и график переходной характеристики частотного привода по возмущающему воздействию (см. Рис. 3.44).
Рис. 3.43. ПХ частотного привода по задающему воздействию, полученная в среде Simulink.
-77-
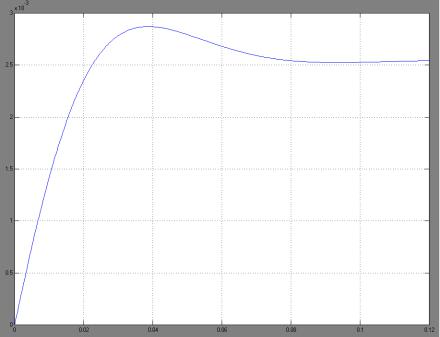
Рис. 3.44. ПХ частотного привода по возмущающему воздействию, полученная в среде Simulink.
Как видно, полученные в результате симуляции переходные характеристики частотного привода совпадают с соответствующими переходными характеристиками частотного привода, полученными по его передаточным функциям. Следовательно, передаточная функция соответствующего последовательного корректирующего устройства была определена верно.
3.13.2. Симуляция позиционного привода
На основании полученной структурной схемы в стандартном одноконтурном виде (см. Рис. 3.29) можно в среде Simulink собрать компьютерную модель позиционного привода для построения переходных характеристик по задающему и возмущающему воздействиям.
В результате такого компьютерного моделирования в среде Simulink были получены: график переходной характеристики позиционного привода по задающему воздействию (см. Рис. 3.45) и график переходной характеристики позиционного привода по возмущающему воздействию (см. Рис. 3.46).
-78-
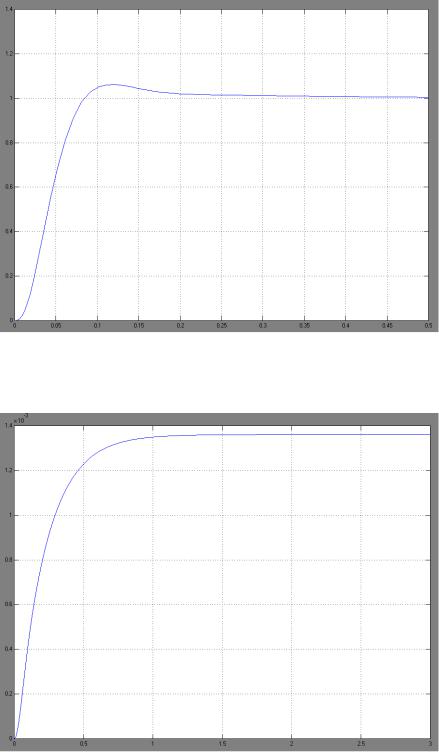
Рис. 3.45. ПХ позиционного привода по задающему воздействию, полученная в среде Simulink.
Рис. 3.46. ПХ позиционного привода по возмущающему воздействию, полученная в среде Simulink.
Как видно, полученные в результате симуляции переходные характеристики позиционного привода также совпадают с соответст-
-79-
вующими переходными характеристиками позиционного привода, полученными по его передаточным функциям. Следовательно, передаточная функция соответствующего последовательного корректирующего устройства также была определена верно.
На основании полученных переходных характеристик можно сделать окончательный вывод о том, что найденные в результате синтеза частотным методом частотного и позиционного приводов последовательные корректирующие устройства обеспечивают требуемые показатели качества работы приводов.
3.14. СИНТЕЗ ЭЛЕКТРОПРИВОДОВ МЕТОДОМ АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ РЕГУЛЯТОРОВ
Оптимальным называется управление, осуществляемое наилучшим по определенным показателям образом. Системы, реализующие оптимальное управление, называются оптимальными. Организация оптимального управления основана на выявлении и реализации предельных возможностей систем.
При разработке систем оптимального управления одним из важнейших шагов является формулировка критерия оптимальности, под которым понимается основной показатель, определяющий задачу оптимизации. Именно по этому критерию оптимальная система должна функционировать наилучшим образом.
Критерий оптимальности обычно представляется в виде некоторого функционала. Сам функционал в этом случае можно определить в виде функции от некоторых переменных системы, а также, возможно, от некоторых ее параметров и от некоторых ее характеристик.
Оптимальное поведение или состояние системы обеспечивается тогда, когда функционал достигает своего экстремума (максимума или минимума).
Одной из наиболее распространенных разновидностей систем оптимального управления являются системы, оптимальные в смысле квадратичного критерия качества процесса управления системой (или объектом).
Методика синтеза замкнутых линейных систем управления, оптимальных в смысле квадратичного критерия качества, была разработана американским и российским математиками Р. Калманом и A. М. Летовым. Она получила название методики аналитического конструирования оптимальных регуляторов (АКОР) [16].
Квадратичный критерий качества функционирования соединил в себе требование минимума отклонений выходных переменных (крите-
-80-