

4241, 4242(ТАУ-без MATLAB) / КР / ТАУ. МетодУказКВыпКурсРаб.МалПоля
.pdf
|
|
1 |
1 |
|
1 |
|
|
wC<x= w <x= · wW<x= 7,714 · 10VR · x 2 1 |
· 0,0233 |
||||||
|
|
1 |
· x 2 0,0233 ; |
|
|
|
|
|
17,974 · 10VN |
|
0,115 |
|
|||
CC |
|
W |
1 |
|
; |
||
w |
<x= w |
<x= · w |
<x= 0,2034 · x · 0,0233 |
x |
|
||
|
|
wCCC<x= wQ<x= 0,571. |
|
|
|
|
|
На основании полученной структурной схемы, приведенной к стандартному одноконтурному виду, можно в среде Simulink собрать компьютерную модель объекта для построения переходных характеристик по управляющему и возмущающему воздействиям.
В результате такого компьютерного моделирования в среде Simulink были получены: график переходной характеристики объекта управления по управляющему воздействию (см. Рис. 3.20) и график переходной характеристики объекта управления по возмущающему воздействию (см. Рис. 3.21).
Как видно, полученные в результате симуляции переходные характеристики ДПТ совпадают с соответствующими переходными характеристиками ДПТ, полученными по передаточным функциям объекта управления.
Рис. 3.20. ПХ по управляющему воздействию для модели ДПТ с частотой вращения вала якоря на выходе в среде Simulink.
-51-
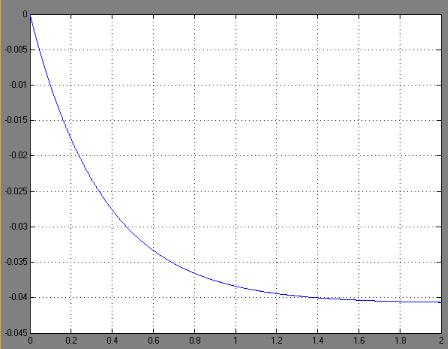
Рис. 3.21. ПХ по возмущающему воздействию для модели ДПТ с частотой вращения вала якоря на выходе в среде Simulink.
3.9.2. Симуляция объекта по второй модели
Модель (3.7) по существу отличается от модели (3.6) только лишь
добавлением простого дифференциального уравнения:
A /]/1 .
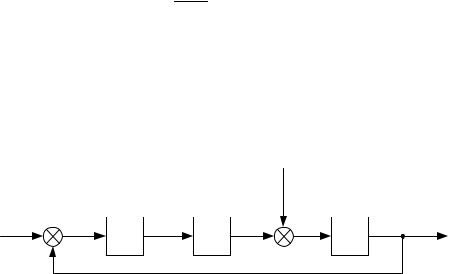
Следовательно, учитывая данное равенство, можно сразу же построить структурную схему ДПТ, у которого входным воздействием является напряжение питания ДПТ, возмущающим воздействием является момент нагрузки ДПТ, а выходной переменной является угол поворота вала ДПТ. Соответствующая структурная схема будет иметь вид, показанный на Рис. 3.22.
-52-

M н (t)
W3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ(t) |
|
u(t) δ (t) |
|
J (t) − |
|
|
|
α (t) |
|
|
|
|
|
|||||||||
W1 |
|
W2 |
W5 |
|||||||||||||||||
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W4 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.22. Структурная схема ДПТ с углом поворота вала якоря на выходе.
Здесь
w <x= wQ
‘<•= N,N W· :O’·•“ |
|
w <x= •<•= |
:, :QW·• |
|
||
C<•= |
|
; |
|
D<•= |
|
; |
<x= 0,0233; |
wW<x= 0,571; |
wR<x= •. |
|
|||
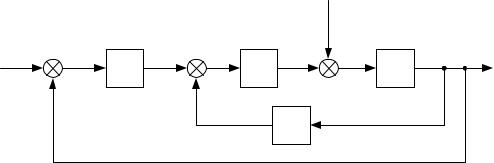
Применение правил структурных преобразований позволяет привести исходную структурную схему ДПТ, изображенную на Рис. 3.22, к стандартному одноконтурному виду. В результате получается схема, приведенная на Рис. 3.23.
u(t) δ (t) |
|
|
− |
|
M н (t) |
||||||
|
|
|
|||||||||
|
|
|
|
|
|
ϕ(t) |
|||||
WI |
|
|
|
|
|
WII |
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||
−
WIII
Рис. 3.23. Приведенная к одноконтурному виду структурная схема ДПТ с углом поворота вала якоря на выходе.
Здесь |
1 |
|
|
1 |
|
1 |
wC<x= w <x= · wQ<x= |
7,714 · 10VR · x 2 1 · 0,0233 |
|||||
17,974 |
1 |
· x 2 0,0233 ; |
|
|
||
· 10VN |
0,115 |
; |
||||
CC |
|
|
Q |
R |
||
w <x= |
w <x= · w |
<x= · w <x= |
x |
|||
-53-
wCCC<x= wW<x= · R1 0,571 · x. w <x=
На основании полученной структурной схемы, приведенной к стандартному одноконтурному виду, можно в среде Simulink собрать компьютерную модель объекта для построения переходных характеристик по управляющему и возмущающему воздействиям.
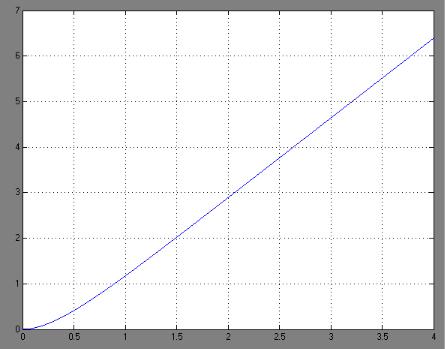
В результате такого компьютерного моделирования в среде Simulink были получены: график переходной характеристики объекта управления по управляющему воздействию (см. Рис. 3.24) и график переходной характеристики объекта управления по возмущающему воздействию (см. Рис. 3.25).
Как видно, полученные в результате симуляции переходные характеристики ДПТ совпадают с соответствующими переходными характеристиками ДПТ, полученными по передаточным функциям объекта управления.
Рис. 3.24. ПХ по управляющему воздействию для модели ДПТ с углом поворота вала якоря на выходе в среде Simulink.
-54-
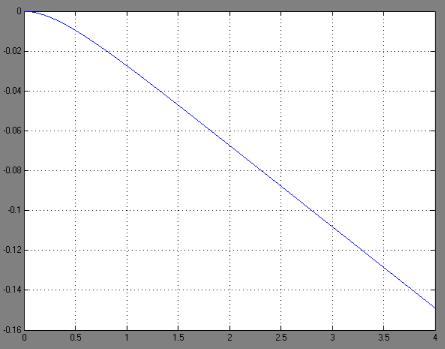
Рис. 3.25. ПХ по возмущающему воздействию для модели ДПТ с углом поворота вала якоря на выходе в среде Simulink.
3.10.СИНТЕЗ ЭЛЕКТРОПРИВОДОВ ЧАСТОТНЫМ МЕТОДОМ
3.10.1.Общие сведения
Синтезом системы управления называют процедуру определения ее структуры и параметров, обеспечивающих заданные показатели качества работы системы. Синтез является важнейшим этапом проектирования и конструирования системы.
Среди методов синтеза можно выделить:
∙Метод корневого годографа.
∙Метод модального управления.
∙Частотный метод (метод логарифмических амплитудно-часто- тных характеристик).
∙Метод аналитического конструирования регуляторов. Частотный метод является одним из наиболее распространенных
среди инженерных методов, используемых для синтеза систем, в силу своей простоты и неплохой наглядности.
Основным недостатком частотного метода является то, что он не может быть применен для синтеза многосвязных систем управления. Другим недостатком данного метода является грубость получаемых в процессе синтеза результатов. По этой причине применение данного метода затруднительно при синтезе систем сравнительно высокого по-
-55-
рядка (где-то выше пятого). Однако для синтеза часто встречающихся в инженерной практике систем управления, подобных электроприводам на основе ДПТ, данный метод вполне годится.
Свойства системы управления полностью определяются частотными характеристиками разомкнутой системы. Если все элементы системы управления минимально-фазовые, то для анализа и синтеза этой системы в частотной области достаточно рассматривать только амплитудно-частотную характеристику разомкнутой системы, так как фазовая частотная характеристика разомкнутой системы в этом случае однозначно определяется ее амплитудно-частотной характеристикой.
В качестве амплитудно-частотной характеристики разомкнутой системы применяют асимптотическую логарифмическую амплитудночастотную характеристику (асимптотическую ЛАЧХ) разомкнутой системы, так как для ее построения почти не требуется расчетов.
Суть частотного метода (в случае выбора последовательного кор-
ректирующего устройства) заключается в следующем. |
|
||||||
Сперва строят асимптотическую ЛАЧХ |
|
|
неизменяемой ра- |
||||
|
Ж< = |
|
методике строят желаемую |
||||
зомкнутой системы. Затем по некоторой |
|
š< = |
|
|
|||
ЛАЧХ |
|
разомкнутой системы. |
|
|
|
|
|
Желаемой называют асимптотическую ЛАЧХ |
|
|
разомкнутой |
||||
системы, имеющую желаемые (требуемые) |
статические и динамиче- |
||||||
|
Ж< = |
|
|||||
ские свойства.
Желаемая ЛАЧХ разомкнутой системы условно может быть представлена состоящей из трех частей, каждая из которых располагается в одной из трех основных частотных областей:
1.Низкочастотная область. То, как расположена ЛАЧХ разомкнутой системы в этой частотной области, определяет статические свойства замкнутой системы управления, ее точность в установившихся режимах. На динамические свойства замкнутой системы управления расположение ЛАЧХ разомкнутой системы в этой области влияет слабо.
2.Среднечастотная область. Расположение ЛАЧХ разомкнутой системы в этой области определяет устойчивость и, следовательно, качество переходного процесса замкнутой системы. То, как расположена ЛАЧХ разомкнутой системы в этой области, в основном определяет динамические свойства замкнутой системы.
3.Высокочастотная область. Расположение ЛАЧХ разомкнутой системы в этой области незначительно влияет на динамические свойства системы. То, как расположена ЛАЧХ разомкнутой системы в этой области, в основном влияет на энергопо-
-56-
требление системы.
Разность |
Ж< = 6 š< = КУ< = |
|
представляет собой ЛАЧХ дополнительного элемента (последовательного корректирующего устройства), который нужно ввести в синтезируемую систему управления для того, чтобы она в результате имела требуемые свойства. Данное корректирующее устройство следует добавить в прямую цепь системы управления, охваченную обратной связью, последовательно.
Из-за грубости частотного метода после отыскания корректирующего устройства приходится каким-либо образом убеждаться в том, что найденное устройство действительно обеспечивает работу синтезированной замкнутой системы управления в соответствии с заданными требованиями.
Если найденное корректирующее устройство не обеспечивает работу синтезированной системы управления в соответствии с заданными требованиями, то процедура синтеза частотным методом «итерационно» повторяется до тех пор, пока заданные требования не будут обеспечены.
3.10.2. Структурная схема частотного привода |
|
||||
Структурная схема частотного электропривода имеет вид, пока- |
|||||
занный на Рис. 3.26. |
|
|
|
|
|
|
|
|
|
M н (t) |
|
.з (t) |
δ (t) |
u(t) |
|
− |
.(t) |
|
|
||||
|
WР1 |
|
WI |
WII |
|
|
− |
|
− |
|
|
|
|
|
|
WIII |
|
|
Рис. 3.26. Структурная схема частотного привода. |
||||
Здесь неизвестной являетсяw передаточная<x= функция корректирующего устройства (регулятора) ž . Передаточные функции прочих
элементов схемы были получены ранее:
wC<x= N,[NW· : ·•“:,: QQ ;
OŸ
-57-
wCC<x= :, • R ; wCCC<x= 0,571.
Структурную схему частотного привода удобно преобразовать к стандартному одноконтурному виду.
Для этого можноw перенести<x= второй сумматор через звено с передаточной функцией C по направлению распространения сигнала и поменять второй и третий сумматоры местами. В результате получится структурная схема, изображенная на Рис. 3.27.
M н (t)
.з (t) δ (t) |
|
|
|
− |
|
.(t) |
|
|
|
|
|
WР1 |
W11 |
W12 |
− |
|
|
Рис. 3.27. Структурная схема частотного привода в стандартном одноконтурном виде.
Здесь |
w <x= wC<x=; |
|
|
|
wCC<x= |
|
w <x= 1 2 wC<x= · wCC<x= · wCCC<x=. |
Ниже приведены результаты вычисления в среде MATLAB этих передаточных функций:
»W1 = tf([1], [0.0000017974, 0.0233]);
»W2 = tf([0.155], [1, 0]);
»W3 = tf([0.571], [1]);
»W11 = W1
Transfer function: 1
---------------------
1.797e-006 s + 0.0233
» W12 = W2 / (1 + W1 * W2 * W3)
Transfer function:
2.786e-007 s^2 + 0.003612 s
--------------------------------------
1.797e-006 s^3 + 0.0233 s^2 + 0.0885 s
-58-

3.10.3. Структурная схема позиционного привода |
|
||||
Структурная схема позиционного электропривода имеет вид, по- |
|||||
казанный на Рис. 3.28. |
|
|
|
|
|
|
|
|
|
M н (t) |
|
ϕз (t) |
δ (t) |
u(t) |
|
− |
ϕ(t) |
|
|
||||
|
WР2 |
|
WI |
WII |
|
|
− |
|
− |
|
|
|
|
|
|
WIII |
|
Рис. 3.28. Структурная схема позиционного привода. |
|||||
Здесь неизвестной являетсяw передаточная<x= функция корректирующего устройства (регулятора) ž . Передаточные функции прочих
элементов схемы были получены ранее:
wC<x= N,[NW· : ·•“:,: QQ ;
OŸ
wCC<x= :,•_ R ; wCCC<x= 0,571 · x.
Структурную схему позиционного привода удобно преобразовать к стандартному одноконтурному виду.
Для этого можноw перенести<x= второй сумматор через звено с передаточной функцией C по направлению распространения сигнала и поменять второй и третий сумматоры местами. В результате получится структурная схема, изображенная на Рис. 3.29.
|
|
|
|
M н (t) |
ϕз (t) |
δ (t) |
|
− |
ϕ(t) |
|
|
|||
|
WР2 |
W21 |
|
W22 |
|
− |
|
|
|
Рис. 3.29. Структурная схема позиционного привода в стандартном одноконтурном виде.
Здесь |
w <x= wC<x=; |
|
-59-
w <x= wCC<x= .1 2 wC<x= · wCC<x= · wCCC<x=
Ниже приведены результаты вычисления в среде MATLAB этих передаточных функций:
»W1 = tf([1], [0.0000017974, 0.0233]);
»W2 = tf([0.155], [1, 0, 0]);
»W3 = tf([0.571, 0], [1]);
»W21 = W1
Transfer function: 1
---------------------
1.797e-006 s + 0.0233
» W22 = W2 / (1 + W1 * W2 * W3)
Transfer function:
2.786e-007 s^3 + 0.003612 s^2
----------------------------------------
1.797e-006 s^5 + 0.0233 s^4 + 0.0885 s^3
3.10.4. Синтез частотного привода
Согласно заданию синтез частотного привода следует выполнить с применением методики Е. А. Санковского – Г. Г. Сигалова.
В качестве исходных данных для выполнения синтеза по данной |
||||||||
|
|
|
|
|
|
и |
|
|
методике могут быть использованы следующие параметры: |
||||||||
1. |
|
|
|
|||||
|
|
|
|
|
|
¡ |
– максимальные значения скорости и ускорения |
|
|
задающего воздействия. |
|||||||
2. |
– |
и |
|
|
|
|
||
|
допустимая ошибка в установившемся режиме. |
|||||||
3. |
|
|
|
|
пп |
– допустимые показатели качества переходной харак- |
||
|
теристики. |
|
||||||
4. |
¢ |
– |
|
запас устойчивости по фазе. |
||||
Согласно методике предложено было рассматривать девять типов желаемой ЛАЧХ разомкнутой системы. При выборе типа желаемой ЛАЧХ рекомендуется исходить из следующих соображений:
a.выбирать ЛАЧХ типа 1 или 2, если задающее воздействие изменяется с большим ускорением, а уровень помех мал;
b.выбирать ЛАЧХ типа 3, 4 или 5, если ускорение задавшего воздействия невелико, но высокий уровень помех;
c.при больших ускорениях и высоком уровне помех выбирать ЛАЧХ типа 6, 7, 8 или 9.
-60-