

4241, 4242(ТАУ-без MATLAB) / КР / ТАУ. МетодУказКВыпКурсРаб.МалПоля
.pdf3.8. ОПРЕДЕЛЕНИЕ ВРЕМЕННЫХ И ЧАСТОТНЫХ ХАРАКТЕРИСТИК ИССЛЕДУЕМОГО ОБЪЕКТА
Ниже приводятся результаты построения в среде компьютерного моделирования MATLAB временных и частотных характеристик исследуемого объекта управления по каждой из четырех полученных ранее передаточных функций (см. Табл. 3.5). Результаты построения приводятся в виде графиков на Рис. 3.6 – Рис. 3.17.
3.8.1. Переходные характеристики
Рис. 3.6. ПХ для wy7<x=.
-41-
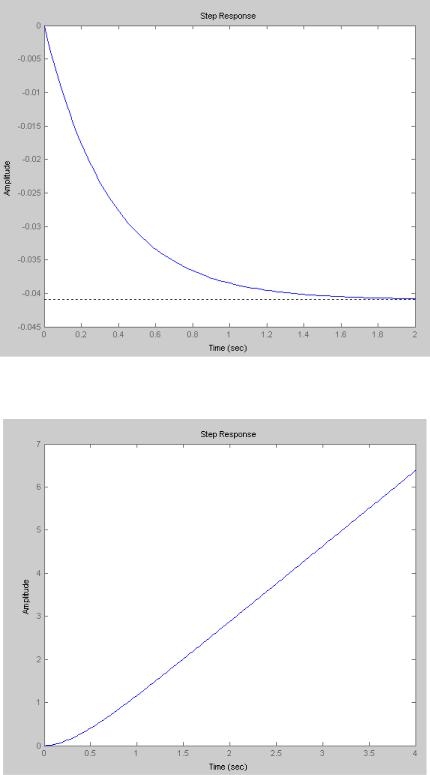
Рис. 3.7. ПХ для wмн7<x=.
Рис. 3.8. ПХ для wy]<x=.
-42-
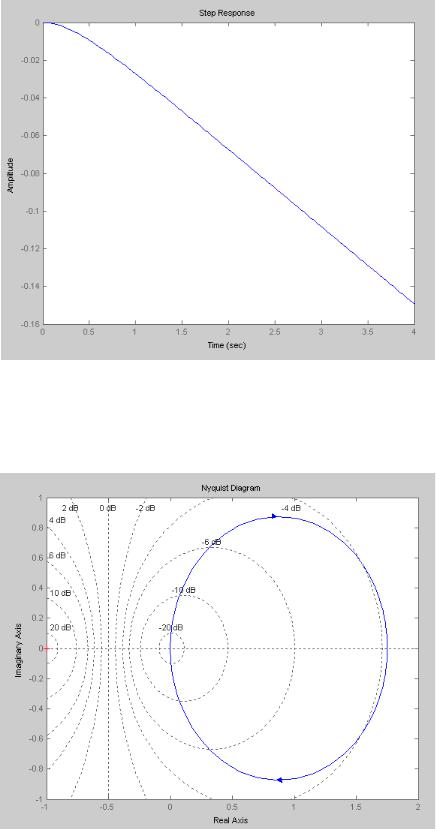
Рис. 3.9. ПХ для wмн]<x=.
3.8.2. Амплитудно-фазовые частотные характеристики
Рис. 3.10. АФЧХ для wy7<x=.
-43-
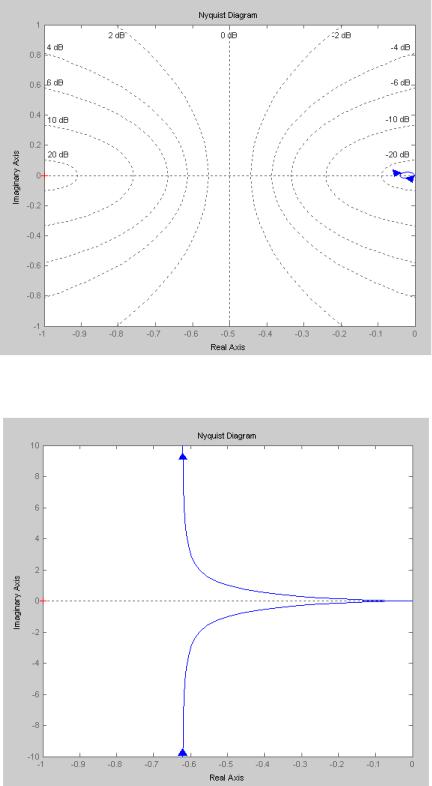
Рис. 3.11. АФЧХ для wмн7<x=.
Рис. 3.12. АФЧХ для wy]<x=.
-44-
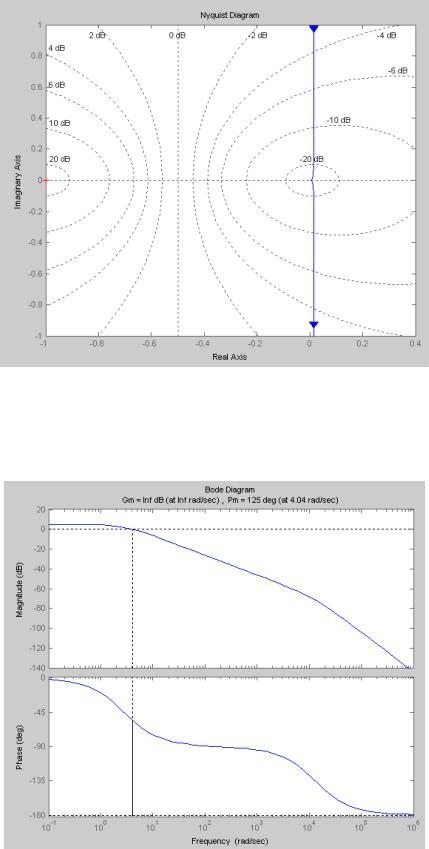
Рис. 3.13. АФЧХ для wмн]<x=.
3.8.3. Логарифмические частотные характеристики
Рис. 3.14. ЛАФЧХ для wy7<x=.
-45-
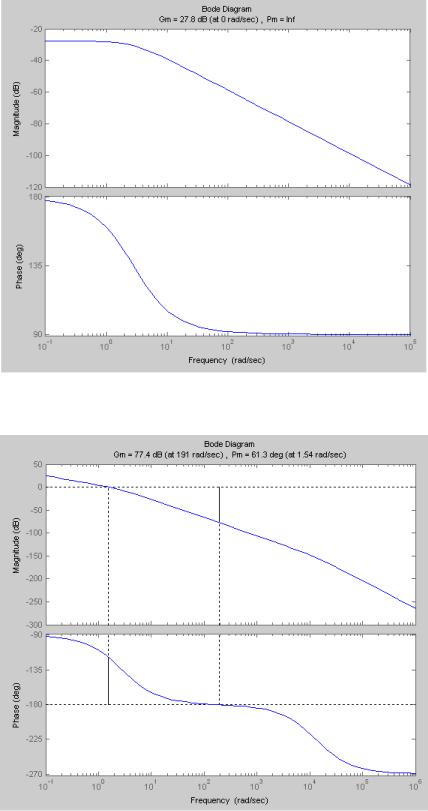
Рис. 3.15. ЛАФЧХ для wмн7<x=.
Рис. 3.16. ЛАФЧХ для wy]<x=.
-46-

Рис. 3.17. ЛАФЧХ для wмн]<x=.
3.9.КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ ОБЪЕКТА В СРЕДЕ
SIMULINK
Процедура компьютерного моделирования объекта в среде Simulink (симуляция объекта) заключается в построении переходных характеристик объекта по каждому из входных воздействий. В работе требуется выполнить симуляцию исследуемого объекта управления (ДПТ) по двум полученным ранее моделям: (3.6) и (3.7).
Согласно заданию, перед началом процесса симуляции ДПТ по каждой из указанных выше моделей следует создать по виду соответствующей модели структурную схему ДПТ и преобразовать ее к стандартному одноконтурному виду (см. Рис. 2.1).
Структурная схема – это условное графическое изображение элемента или системы управления, которое дает наглядное представление об их строении.
На схему наносят динамические звенья, составляющие элемент или систему. Динамическое звено изображают прямоугольником, в который вписывают передаточную функцию или ее обозначение. В последнем случае передаточные функции должны быть приведены в пояснениях к схеме.
На схему в виде стрелок наносят также все внешние воздействия
-47-
и воздействия динамических звеньев одного на другое, около каждой стрелки указывают, какую физическую величину или обобщенную координату она изображает. Разветвление сигнала обозначают точкой, от которой отходит соответствующее число стрелок.
Суммирование сигналов обозначают кружком с крестиком. Если сигнал6вычитается, то у стрелки, изображающей этот сигнал, ставят знак « » либо зачерняют сектор кружка, к которому эта стрелка направлена.
Структурную схему системы составляют на основании ее функциональной схемы и дифференциальных уравнений элементов.
Для составления структурной схемы необходимо дифференциальные уравнения элементов преобразовать в операторную форму, полагая начальные условия нулевыми. Получить передаточные функции каждого элемента и нанести их на структурную схему.
При составлении структурной схемы удобно начинать с задающего воздействия и располагать динамические звенья, составляющие прямую цепь системы, слева направо до регулируемой величины. Тогда основная обратная связь системы и местные обратные связи будут направлены справа налево.
3.9.1. Симуляция объекта по первой модели
При нулевых начальных условиях первое уравнение в системе
уравнений в операторной форме запишется в виде
7,714(3.6)· 10VR · x · ?<x= 2 ?<x= 4<x= 6 0,571 ·:A<x=.
Пусть введено обозначение: |
|
|
||||
Тогда |
, |
очевидно |
4<x= 6 0,571 · A<x= <x=. |
|||
|
|
|
, справедливо равенство: |
|||
Так как |
|
,714 · 10 |
VR |
· x 2 1= <x=. |
||
|
|
|
?<x=<7 |
|
||
|
|
|
передаточная функция некоторого объекта – это отноше- |
|||
ние изображения Лапласа выходной переменной этого объекта к изображению Лапласа входной переменной объекта при нулевых начальных условиях, то получится следующая передаточная функция звена,
соответствующего полученному уравнению: |
|
|
w <x= ‘<•= N,N W· :O’·•“ |
|
|
C<•= |
|
. |
Аналогичные действия можно произвести и со вторым уравнением в системе уравнений (3.6).
В операторной форме оно запишется в виде:
-48-
Пусть |
0,2034 · x · A<x= ?<x= 6 0,0233 · <x= |
||||
|
|
|
|
н |
. |
|
|
|
|
|
|
Тогда |
введено обозначение: |
|
|
|
|
|
?<x= 6 0,0233 · <x= ”<x= |
|
|||
|
|
|
н |
. |
|
|
|
|
|
|
|
|
справедливо равенство: |
|
|
|
|
В результате |
0,2034 · x · A<x= ”<x= |
|
|
||
|
|
|
. |
|
|
|
|
получится следующая передаточная функция звена, |
|||
соответствующего полученному уравнению: |
|
|
|||
|
|
w <x= •<•= |
:, :QW·•. |
|
|
|
|
D<•= |
|
|
|
Пусть введены еще< = две передаточные< =функции wQ x 0,571 и wW x 0,0233.
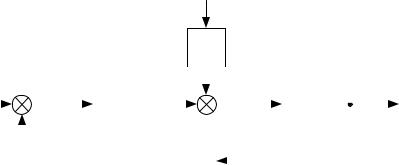
Тогда структурная схема ДПТ, у которого входным воздействием является напряжение питания ДПТ, возмущающим воздействием является момент нагрузки ДПТ, а выходной переменной служит частота вращения вала ДПТ, будет иметь вид, изображенный на Рис. 3.18.
M н (t)
W4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(t) δ (t) |
|
|
J (t) − |
|
|
|
α (t) |
|
|
.(t) |
|||||||
|
W1 |
|
W2 |
||||||||||||||
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W3 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.18. Структурная схема ДПТ с частотой вращения вала якоря на выходе.
Для приведения полученной схемы к стандартному одноконтурному виду применяются правила структурных преобразований.
Ниже приводится описание некоторых основных, наиболее важных, правил структурных преобразований:
1.Если имеется цепочка из последовательно соединенных звеньев, то эквивалентная передаточная функция такой цепочки равна произведению передаточных функций, входящих в эту цепочку.
2.Если звенья соединены параллельно, то эквивалентная передаточная функция такого соединения равна сумме передаточ-
-49-
|
|
|
, |
w |
|
ных функций, входящих в соединение. |
|
|
|||
3. Если звено с передаточной функцией |
|
охвачено обратной |
|||
связью с передаточной функцией |
|
|
то эквивалентная пере- |
||
|
соединения определяется по форму- |
||||
даточная функция такого |
|
w: |
|
|
|
ле:
Здесь знак «+» соответствует отрицательной обратной связи, а знак «–» – положительной. w
4. Если через звено с передаточной функцией перенести точку съема по направлению передачи сигнала, то эквивалентная передаточная функция, которую необходимо1⁄w включить в цепь съема сигнала должна равняться . Если же точку съема перенести против направления передачи сигнала, тоwэта эквивалентная передаточная функция должна равняться .
5.При переносе сумматора через звено по направлению передачи сигнала в цепь сигнала необходимо ввести эквивалентноеw звено, передаточная функция которого должна равняться , а
при переносе против направления передачи сигнала – эквивалентное1⁄звеноw , передаточная функция которого должна равняться .
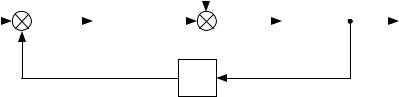
Применение правил структурных преобразований позволяет привести исходную структурную схему ДПТ, изображенную на Рис. 3.18, к стандартному одноконтурному виду. В результате получается схема, приведенная на Рис. 3.19.
u(t) δ (t) |
|
|
|
− |
|
|
M н (t) |
||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
.(t) |
|||||
|
WI |
|
WII |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||||||||
−
WIII
Рис. 3.19. Приведенная к одноконтурному виду структурная схема ДПТ с частотой вращениявала якоря на выходе.
Здесь
-50-