

4241, 4242(ТАУ-без MATLAB) / КР / ТАУ. МетодУказКВыпКурсРаб.МалПоля
.pdfРаздел 2. ЗАДАНИЯ К КУРСОВЫМ РАБОТАМ
2.1. ИСХОДНЫЕ ДАННЫЕ
Общее наименование темы курсовых работ: «Анализ и синтез частотного и позиционного электроприводов постоянного тока».
В качестве исходных данных заданными являются параметры двигателя постоянного тока (ДПТ), а также метод синтеза и требуемые показатели качества синтезируемых на основе ДПТ частотного и позиционного электроприводов постоянного тока.
Варианты параметров ДПТ, требуемых показателей качества синтезируемых приводов и метода синтеза приведены в Табл. 2.1.
Табл. 2.1. Варианты параметров ДПТ и требуемых показателей качества приводов.
Вариант |
I ян |
ωн |
M сн |
J |
Lя |
Rя |
Kе |
K м |
tпп |
σ |
δmax |
X max |
ωx |
M |
ϕ |
Способ синтеза |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
1 |
2,7 |
314,1 |
0,7 |
0,011 |
0,10 |
3,90 |
0,021 |
12,0 |
0,10 |
5 |
0,09 |
1,0 |
0,9 |
1,50 |
20 |
Сол. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
3,0 |
314,1 |
0,8 |
0,022 |
0,21 |
3,70 |
0,020 |
11,8 |
0,20 |
10 |
0,10 |
1,0 |
5,1 |
1,10 |
30 |
С-С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
3,4 |
314,1 |
0,8 |
0,025 |
0,28 |
3,50 |
0,020 |
11,7 |
0,15 |
15 |
0,13 |
0,9 |
5,7 |
1,85 |
15 |
Бес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
3,8 |
314,1 |
1,0 |
0,029 |
0,33 |
3,30 |
0,018 |
11,5 |
0,25 |
20 |
0,05 |
0,7 |
0,9 |
1,40 |
75 |
Сол. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
4,3 |
314,1 |
1,1 |
0,034 |
0,36 |
3,10 |
0,017 |
11,4 |
0,30 |
25 |
0,07 |
0,7 |
1,1 |
1,11 |
63 |
С-С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
5,0 |
314,1 |
1,2 |
0,036 |
0,39 |
2,90 |
0,015 |
11,2 |
0,35 |
20 |
0,08 |
0,7 |
3,2 |
1,85 |
45 |
Бес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
5,3 |
314,1 |
1,3 |
0,039 |
0,42 |
2,70 |
0,016 |
10,7 |
0,45 |
15 |
0,09 |
0,5 |
2,1 |
1,15 |
23 |
Бес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-11-
-12- |
21 |
20 |
19 |
18 |
17 |
16 |
15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
121110987654321 |
параметровВарианты.1.2.ТаблПродолжение .приводовкачествапоказателей |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6,7 |
6,3 |
5,9 |
5,5 |
5,1 |
4,7 |
4,3 |
3,8 |
3,3 |
3,0 |
2,7 |
6,7 |
6,5 |
6,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
157,0 |
157,0 |
157,0 |
157,0 |
157,0 |
157,0 |
314,1 |
314,1 |
314,1 |
314,1 |
314,1 |
314,1 |
314,1 |
314,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3,6 |
3,5 |
3,4 |
3,2 |
3,0 |
2,8 |
2,6 |
2,4 |
2,2 |
2,0 |
1,8 |
1,6 |
1,5 |
1,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,048 |
0,052 |
0,055 |
0,059 |
0,062 |
0,064 |
0,065 |
0,062 |
0,059 |
0,055 |
0,052 |
0,048 |
0,044 |
0,042 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,50 |
0,47 |
0,44 |
0,40 |
0,36 |
0,32 |
0,28 |
0,24 |
0,20 |
0,15 |
0,10 |
0,55 |
0,52 |
0,46 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,20 |
1,40 |
1,50 |
1,30 |
1,10 |
1,00 |
1,20 |
1,40 |
1,60 |
1,80 |
2,00 |
2,10 |
2,30 |
2,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,025 |
0,015 |
0,017 |
0,019 |
0,021 |
0,023 |
0,025 |
0,027 |
0,029 |
0,022 |
0,021 |
0,023 |
0,025 |
0,010 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11,2 |
11,7 |
12,0 |
12,2 |
11,9 |
11,7 |
11,5 |
11,3 |
11,2 |
11,0 |
10,8 |
10,6 |
10,3 |
10,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,50 |
1,40 |
1,20 |
1,00 |
0,90 |
0,80 |
0,65 |
0,75 |
0,80 |
0,70 |
0,60 |
0,50 |
0,40 |
0,55 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
20 |
15 |
10 |
5 |
10 |
15 |
20 |
25 |
20 |
15 |
10 |
5 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,05 |
0,08 |
0,04 |
0,09 |
0,03 |
0,12 |
0,10 |
0,02 |
0,06 |
0,05 |
0,07 |
0,03 |
0,08 |
0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДПТ |
|
1,0 |
0,5 |
0,7 |
1,0 |
1,0 |
0,7 |
0,7 |
1,0 |
0,5 |
0,7 |
1,0 |
1,0 |
0,5 |
0,5 |
13 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
требуемыхи |
|
1,7 |
3,2 |
5,7 |
1,7 |
2,5 |
5,5 |
4,5 |
2,1 |
3/2 |
4,2 |
5,2 |
1,5 |
1,2 |
4,3 |
161514 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,20 |
1,80 |
1,42 |
1,74 |
1,31 |
1,25 |
1,16 |
1,82 |
1,51 |
1,63 |
1,22 |
1,75 |
1,35 |
1,81 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
59 |
42 |
39 |
51 |
69 |
29 |
44 |
61 |
34 |
29 |
40 |
71 |
35 |
64 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С-С |
Бес. |
Сол. |
Сол. |
Бес. |
С-С |
С-С |
Бес. |
Сол. |
Бес. |
С-С |
Сол. |
С-С |
Сол. |
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Продолжение Табл. 2.1. Варианты параметров ДПТ и требуемых показателей качества приводов.
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
22 |
7,1 |
157,0 |
3,7 |
0,044 |
0,54 |
1,00 |
0,027 |
10,9 |
0,85 |
20 |
0,09 |
0,5 |
4,9 |
1,49 |
70 |
Бес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 |
6,3 |
157,0 |
3,8 |
0,042 |
0,58 |
0,80 |
0,029 |
10,7 |
0,95 |
15 |
0,06 |
0,5 |
5,1 |
1,55 |
32 |
С-С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
24 |
5,7 |
157,0 |
3,5 |
0,039 |
0,62 |
0,78 |
0,028 |
10,5 |
1,05 |
10 |
0,10 |
0,5 |
3,7 |
1,29 |
29 |
Сол. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 |
5,2 |
157,0 |
3,3 |
0,035 |
0,66 |
0,75 |
0,027 |
10,2 |
0,80 |
5 |
0,07 |
0,7 |
4,8 |
1,32 |
45 |
Бес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
4,8 |
157,0 |
3,1 |
0,033 |
0,70 |
0,73 |
0,025 |
12,2 |
0,70 |
10 |
0,11 |
0,7 |
5,9 |
1,62 |
57 |
Сол. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
4,1 |
157,0 |
2,9 |
0,028 |
0,73 |
0,70 |
0,023 |
12,1 |
0,55 |
15 |
0,08 |
0,7 |
2,9 |
1,10 |
60 |
С-С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
28 |
3,4 |
157,0 |
2,7 |
0,025 |
0,77 |
1,70 |
0,021 |
11,7 |
0,40 |
20 |
0,02 |
1,0 |
4,1 |
1,33 |
25 |
Бес. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29 |
3,0 |
157,0 |
2,5 |
0,023 |
0,81 |
2,70 |
0,019 |
11,2 |
0,90 |
25 |
0,03 |
1,0 |
2,9 |
1,72 |
37 |
Сол. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
2,6 |
157,0 |
2,3 |
0,010 |
0,62 |
1,10 |
0,017 |
11,0 |
1,20 |
20 |
0,05 |
1,0 |
3,0 |
1,41 |
45 |
С-С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В таблице использованы следующие обозначения и сокращения:
1.I ян , А – ток якоря ДПТ номинальный.
2.ωн , рад/с – номинальная частота вращения вала якоря ДПТ.
3.M сн , Н·м – номинальный момент сопротивления на валу якоря
ДПТ.
4.J , кг·м2 – момент инерции вала якоря ДПТ.
5.Lя , мГн – индуктивность обмотки якоря ДПТ.
6.Rя , Ом – сопротивление обмотки якоря ДПТ.
7.Kе , В·с/рад – электрическая постоянная ДПТ.
8.K м , Н·м/А – магнитная постоянная ДПТ.
9.tпп , с – требуемое время переходного процесса для синтезируемых электроприводов.
-13-
10.σ , % – требуемое перерегулирование для синтезируемых электроприводов.
11.δmax – максимальная установившаяся ошибка регулирования для синтезируемых электроприводов.
12.X max – амплитуда задающего гармонического воздействия
электроприводов.
13.ωx , рад/с – частота задающего гармонического воздействия электроприводов.
14.M – требуемый показатель колебательности синтезируемых электроприводов.
15.ϕ , ° – требуемый запас устойчивости по фазе для синтези-
руемых электроприводов.
16.«Сол.» – способ В. В. Солодовникова.
17.«С-С» – способ Е. А. Санковского – Г. Г. Сигалова.
18.«Бес.» – способ В. Н. Бесекерского.
При подборе данных, приведенных в таблице, для получения моделей двигателей, близких по характеристикам к реально существующим ДПТ выдерживались следующие условия:
T = |
Lя |
|
[0,01; 0,1] ; T |
= |
|
Jω |
|
[0,1; 1]; |
||
эл |
|
Rя |
|
эм |
|
|
K м I ян |
|
|
|
|
|
|
|
|
|
|
|
|||
Kω = |
Kеωн |
|
[0,5; 1,5] ; Kн |
= |
|
M сн |
|
[0,05; 0,5]. |
||
Rя I ян |
|
I ян K м |
||||||||
|
|
|
|
|
|
|||||
2.2. ТРЕБОВАНИЯ
При выполнении курсовых работ требуется:
1.Получить математическую модель (ММ) ДПТ, где входным воздействием является напряжение питания ДПТ ( u ), возмущающим воздействием является момент нагрузки ДПТ ( M н ), а выходной переменной является частота вращения вала ротора (якоря) ДПТ (ω ).
2.Получить ММ ДПТ, где входным воздействием является напряжение питания ДПТ ( u ), возмущающим воздействием является момент нагрузки ДПТ ( M н ), а выходной переменной является угол поворота вала ротора (якоря) ДПТ (ϕ ).
3.На основе найденных моделей получить общую математическую модель ДПТ в стандартной форме пространства состояний:
-14-
|
d |
|
x = Ax + Bu |
|
(2.1) |
|
|
|
|
|
|
|||
dt |
, |
|||
|
|
= Cx + Du |
||
|
y |
|||
|
x1 |
|
u1 |
|
u |
u |
|
y1 |
|
|
ω |
|||
где x = |
|
x |
|
|
||||||||||
|
2 |
|
; u = |
|
= |
|
= |
|
; y = |
|
= |
. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
u2 |
|
|
f |
M |
н |
y2 |
|
ϕ |
|
|
x3 |
|
|
|
|
|
|
|
|
|
|
|
||
На основании модели (2.1) получить две модели ДПТ в стандартной форме пространства состояний для случаев, когда
переменной является частота вращения вала якоря
и когдаy выходной переменной является угол пово- рота вала якоря .
4.По найденным двум последним моделям в форме пространства состояний определить устойчивость ДПТ. Для этого для каждой из двух моделей получить характеристическое уравнение объекта det(λE − A) = 0 и найти корни уравнения в сре-
де MATLAB.
5.На основе модели (2.1) получить четыре передаточных функции (ПФ) ДПТ Wuy1 , Wfy1 , Wuy2 , Wfy2 .
6.По каждой полученной передаточной функции ДПТ определить устойчивость ДПТ при помощи критериев устойчивости Гурвица и Михайлова.
7.Для каждой полученной передаточной функции определить в среде моделирования MATLAB переходную характеристику (ПХ, step()), амплитудно-фазовую частотную характеристику (АФЧХ, nyquist()), логарифмическую амплитуднофазовую частотную характеристику (ЛАФЧХ, bode()).
8.По моделям, полученным в пунктах 1 и 2, создать две структурные схемы (СС) ДПТ. По правилам структурных преобразований привести полученные СС к виду, приведенному на Рис. 2.1. Для каждой СС в среде Simulink построить ПХ ДПТ по управляющему воздействию и по возмущающему воздействию (всего будет четыре ПХ). Найденные ПХ должны совпадать по виду с ПХ, полученными в пункте 6.
-15-
|
|
f (t) |
u(t) |
δ (t) |
y(t) − y1 или y2 |
|
W1 |
W2 |
yос (t)
Wос
Рис. 2.1. Вид структурной схемы ДПТ после структурных преобразований.
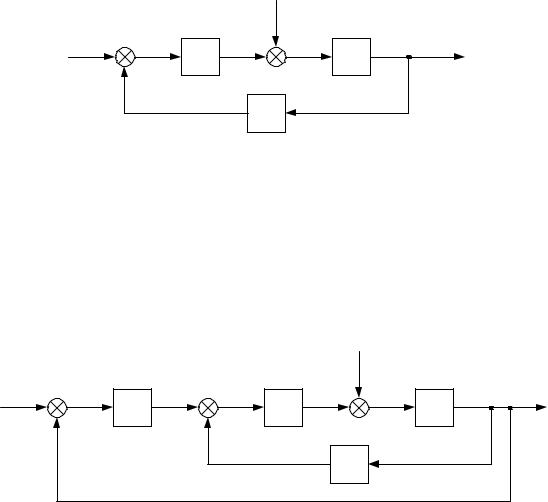
9.Структурные схемы электроприводов (частотного и позиционного) представить в виде, приведенном на Рис. 2.2. В случае необходимости разрешается преобразовать их к одноконтурному виду. Здесь неизвестными являются передаточные функции регуляторов Wр1 (для частотного привода) и Wр2 (для позиционного привода).
|
|
|
|
f (t) |
yз (t) |
δ (t) |
u(t) |
|
y(t) − y1 или y2 |
|
|
Wр |
W1 |
W2 |
|
− |
|
− |
|
|
|
yос (t) |
|
Wос |
|
|
|
|
Рис. 2.2. Вид структурной схемы частотного или позиционного привода.
10.Частотным методом заданным способом (одним из трех способов согласно варианту) выполнить синтез регуляторов Wр1 и Wр2 , обеспечивающих требуемые показатели качества частотного и позиционного электроприводов.
11.Для каждого из синтезированных приводов определить ПФ по задающему и ПФ по возмущающему воздействиям (всего получится четыре ПФ).
12.Для каждой полученной передаточной функции определить в среде моделирования MATLAB переходную характеристику (ПХ, step()), амплитудно-фазовую частотную характеристику (АФЧХ, nyquist()), логарифмическую амплитуднофазовую частотную характеристику (ЛАФЧХ, bode()).
-16-
13.Каждую СС привода собрать в среде Simulink и построить ПХ электропривода по задающему воздействию и по возмущающему воздействию (всего будет четыре ПХ). Найденные ПХ должны совпадать по виду с ПХ, полученными в пункте 11.
14.Оценить соответствие полученных результатов с требуемыми
в задании показателями качества.
Дополнительно к указанным требованиям могут быть предъявлены требования синтеза позиционного и/или частотного электроприводов постоянного тока (приводов на основе ДПТ) другими, более развитыми в смысле математического аппарата методами синтеза, обеспечивающими модальное, робастное, оптимальное, адаптивное управление объектом.
Среди таких методов особо следует отметить:
1.Метод синтеза модального управления электроприводом по вектору состояния объекта управления, позволяющий обеспечить управление объектом в соответствии с заданным расположением полюсов его характеристического полинома.
2.Метод аналитического конструирования регуляторов, позволяющий обеспечить оптимальное управление объектом в смысле квадратичного критерия качества процесса управле-
ния объектом или системой.
Требования к синтезу частотного и позиционного электроприводов постоянного тока этими методами выдаются преподавателем отдельно и, как правило, индивидуально.
Также дополнительно к указанным требованиям преподавателем могут быть предъявлены требования синтеза дискретного (цифрового) позиционного и/или частотного электроприводов постоянного тока упомянутыми выше методами при заданном периоде дискретизации процесса управления.
-17-

Раздел 3. ПРИМЕР ВЫПОЛНЕНИЯ РАБОТЫ
Приведенный ниже пример не следует рассматривать, как пример оформления отчета по курсовой работе. Данный пример раскрывает лишь последовательность этапов и действия, которые должен выполнять студент в процессе выполнения задания по курсовой работы.
3.1.ИСХОДНЫЕ ДАННЫЕ ДЛЯ ИССЛЕДОВАНИЯ
ВТабл. 3.1 приведены параметры двигателя постоянного тока и требуемые показатели качества частотного и позиционного электроприводов постоянного тока.
Табл. 3.1. Параметры ДПТ и требуемые показатели качества синтезируемых приводов.
як |
н |
сн |
|
я |
я |
|
|
пп |
|
|
|
|
|
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
рад/с |
H·м |
кг·м2 |
мГн |
Ом |
B · c/рад |
H · м/А |
с |
% |
– |
– |
рад/с |
– |
град |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3,3 |
314,1 |
0,9 |
0,025 |
0,27 |
3,5 |
0,021 |
11,7 |
0,15 |
15 |
0,12 |
1 |
5,7 |
1,9 |
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Синтез приводов следует производить частотным методом. При |
|||||||||||||
этом синтез частотного привода следует выполнить по методике Е. А.
Санковского – |
Г. Г. Сигалова, а синтез позиционного привода следует |
|
выполнить по методике В. В. Солодовникова. |
||
В Табл. 3.1 использованы следующие условные обозначения: |
||
як |
– номинальный ток якоря ДПТ; |
|
– |
номинальная частота вращения вала якоря; |
|
н |
– |
номинальный момент сопротивления (нагрузки) на валу |
сн |
|
якоря ДПТ; |
– момент инерции вала якоря ДПТ;
я– индуктивность обмотки якоря ДПТ;
я– сопротивление обмотки якоря ДПТ;
-18-

– электрическая постоянная ДПТ;
– магнитная постоянная ДПТ;
пп– требуемое время переходного процесса для синтезируемых электроприводов;
–требуемое перерегулирование для синтезируемых электроприводов;
–максимальная установившееся ошибка регулирования для синтезируемых электроприводов;
–амплитуда задающего гармонического воздействия приводов;
– частота задающего гармонического воздействия приводов;
–требуемый показатель колебательности синтезируемых электроприводов;
–требуемый запас устойчивости по фазе для синтезируемых приводов.
3.2.ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
1.Получить математическую модель ДПТ:
a)у которого входным воздействием является напряжение питания ДПТ, возмущающим воздействием является момент нагрузки ДПТ, а выходной переменной служит частота вращения вала якоря ДПТ;
b)у которого входные и возмущающие воздействия такие же, а выходной переменной является угол поворота вала якоря ДПТ.
2.На основе полученных математических моделей составить общую модель и две частные модели объекта в стандартной форме пространства состояний.
3.Определить устойчивость объекта управления по найденным частным моделям объекта управления в форме пространства состояний.
4.На основании общей модели объекта управления в стандартной форме пространства состояний получить четыре передаточные функции ДПТ, со следующими входами и выходами
(см. Табл. 3.2).
Табл. 3.2. Входные и выходные сигналы передаточных функций ДПТ.
№ |
Вход |
Выход |
1 |
Напряжение |
Частота |
-19-
2 |
Момент сопротивления |
Частота |
3 |
Напряжение |
Угол поворота |
4 |
Момент сопротивления |
Угол поворота |
5.По каждой полученной передаточной функции ДПТ определить устойчивость ДПТ при помощи критериев устойчивости Гурвица и Михайлова.
6.Для каждой передаточной функции определить в компьютерной среде MATLAB:
a)переходную характеристику;
b)амплитудно-фазовую частотную характеристику (АФЧХ, частотный годограф Найквиста);
c)логарифмическую амплитудно-фазовую частотную характеристику (ЛАФЧХ).
7.По математическим моделям ДПТ построить две структурные схемы. По правилам структурных преобразований привести эти схемы к стандартному одноконтурному виду. Для каждой схемы в среде Simulink построить переходные характеристики ДПТ по задающему и по возмущающему воздействиям.
8.Провести синтез частотного и позиционного электроприводов. Для этого частотным методом, используя соответствующий способ (методику), выполнить синтез последовательных регуляторов, обеспечивающих требуемые показатели качества частотного и позиционного приводов.
9.Для каждого из синтезированных приводов определить передаточные функции по задающему и возмущающему воздействиям.
10.Для каждой передаточной функции определить в компьютерной среде MATLAB:
a)переходную характеристику;
b)амплитудно-фазовую частотную характеристику (АФЧХ, частотный годограф Найквиста);
c)логарифмическую амплитудно-фазовую частотную характеристику (ЛАФЧХ).
11.Каждую структурную схему привода собрать в компьютерной среде MATLAB (Simulink) и построить переходные характеристики по задающему и возмущающему воздействиям.
12.Оценить соответствие полученных результатов с требуемыми показателями качества.
13.Синтезировать системы оптимального управления ДПТ (оптимальный частотный привод и оптимальный позиционный
-20-