

4241, 4242(ТАУ-без MATLAB) / КР / ТАУ. МетодУказКВыпКурсРаб.МалПоля
.pdfНиже приводится последовательность действий, выполненных в процессе синтеза частотного привода по данной методике.
1.Определение передаточной функции разомкнутой неизменяемой части системы и запись ее в zpk-форме.
»W = W11 * W12
Transfer function:
2.786e-007 s^2 + 0.003612 s
-----------------------------------------------------------
3.231e-012 s^4 + 8.376e-008 s^3 + 0.000543 s^2 + 0.002062 s
» W = zpk(W) |
|
|
|
|
|
|
|
|
|
|
|
|
Zero/pole/gain: |
|
|
|
|
|
|
|
|
|
|
|
|
86235.6738 s (s+1.296e004) |
|
|
|
|
|
|||||||
------------------------------------- |
|
|
|
|
||||||||
s (s+1.296e004) (s+1.296e004) (s+3.8) |
|
|
|
|
||||||||
|
Таким образом, приведенная к стандартному виду передаточ- |
|||||||||||
|
ная функция неизменяемой части системы имеет следующий |
|||||||||||
|
вид: wš <x= |
|
|
V{ |
|
1,75 |
<0,263x 2 1= |
. |
||||
2. |
Отыскание для<77,16 · 10 |
|
x 2 1= · |
|
||||||||
|
|
|
каждого множителя сопрягающей частоты и |
|||||||||
|
определение значения L<0=: |
|
|
|
|
|
|
|||||
|
|
|
|
K |
0,263 3,8 с ; |
|
|
|
||||
|
|
|
и |
1 |
|
1 |
|
|
V |
|
|
|
|
|
и |
1 |
|
1 |
|
|
|
V |
; |
|
|
|
|
K 77,16 · 10V{ 12960с |
|
|||||||||
|
<0= 20lg 20lg1 |
|
дБ |
|
||||||||
3. |
|
|
|
|
|
|
|
ЛАЧХ неизменяемой части сис- |
||||
Построение асимптотической |
,75 4,86 . |
|
||||||||||
|
темы. Из-за простоты получаемого графика асимптотической |
|||||||||||
|
ЛАЧХ данное построение здесь не приводится. |
¡ |
||||||||||
4. |
Построение запретной зоны. Так как величины |
|||||||||||
|
не заданы, то запретную зону строить не требуется. и |
|||||||||||
5.Выбор типовой ЛАЧХ желаемой разомкнутой системы по виду асимптотической ЛАЧХ неизменяемой части системы и в соответствии с рекомендациями. В данном конкретном случае выбрана первая типовая ЛАЧХ желаемой разомкнутой системы (см. Табл. 3.6).
-61-

Табл. 3.6. Первая типовая ЛАЧХ желаемой разомкнутой системы.
|
|
|
|
Асимптотическая ЖЛАЧХ |
|
|
|
|
|
|
|
|
Передаточная функция |
||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ж |
|
|
||
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wж |
|
ж |
|
ж |
2 1= |
||||
|
|
|
|
|
|
§ |
|
|
Q |
|
|
|
|
|
|
|
|
|
|||||||||||||
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
<K |
2 1=<KQ |
||||||||||||
|
|
6. Запись необходимого значения запаса устойчивости по фазе: |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
с |
sПП |
|
|
9 |
60 сV . |
|
|
|
|
|
|
|
||||||||||
7. |
|
|
|
|
|
|
|
|
|
|
|
среза: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Нахождение частоты |
¢ 15°. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
8. |
Принятие |
|
|
|
|
s 9 |
как |
¢ 15°. |
|
|
|
|
|
|
ж |
|
|||||||||||||||
|
|
|
Здесь величина |
|
|
|
, так0,15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
утверждения что сопрягающую частоту |
|
|
создает |
||||||||||||||||||||||
|
|
|
постоянная времени 0,263 |
|
. неизменяемой части |
системы: |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
с 3,8 сV . |
|
|
|
|
|
|
|
|
|
||||||||
9. |
По внешнему виду |
|
ж |
0,263 |
|
V |
|
ω |
: |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
типовой ЛАЧХ и по соотношению из таб- |
||||||||||||||||||
|
|
|
лицы Табл. 3.6 определение величины |
|
ж |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
” |
|
|
|
|
с |
|
6 |
15 1,31. |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
• 6 ¢ |
• |
|
|
|
|
|
|
||||||||||||||||
|
|
10. Вычисление |
постоянной в радианах: |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
60 с . |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
11. Принятие |
: |
|
|
|
2 |
|
|
|
2 |
|
57,3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
частоту |
|
|
|
|
|
|
|
|
|
|
|
|
· 10 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
утверждения о том |
|
что постоянная времени неиз- |
|||||||||||||||||||||||
|
|
|
|
|
Wж |
Wж |
|
|
|
1 |
|
|
V{ |
12960 сV . |
|
|
|
|
|
|
|||||||||||
|
|
|
меняемой части системы |
77,16 |
|
|
V{с. создает сопрягающую |
||||||||||||||||||||||||
|
|
2. Определение |
|
|
77,16 · 10 |
1 |
|
|
|
|
ωQж |
|
|
ж |
|
|
|
|
V |
||||||||||||
1 |
|
” |
|
|
1 |
|
|
1,31 |
|
|
|
|
|
|
: |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
сопрягающей частоты |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
Qж |
2 · с 6 |
Wж |
|
2 · 60 6 12960 |
0,011 ¬ Q |
90,9 с . |
|||||||||||||||||||||||
13. Выполнение проверки правильности (корректности) расчетов:
-62-

ж |
60 |
|
|
” |
1,31 |
|
с |
60 |
1 |
и |
2<- 6 1= |
2 |
0,7. |
Можно считать, что расчеты выполнены корректно.
14. Принятие заключения о виде передаточной функции желае-
мой ЛАЧХ разомкнутой системы15:
wЖ <x= <0,263x 2 1= · <0,011x 2 1=.
15. Определение ЛАЧХ корректирующего устройства. Для этого следует найти разность желаемой ЛАЧХ разомкнутой системы
и ЛАЧХ неизменяемой части системы: |
|
|
|
||||
В общем |
|
< = 6 < = |
КУ |
< =. |
|
|
|
|
Ж |
š |
|
|
|
|
|
|
случае это удобно сделать графически. При каждой |
||||||
из сопрягающий частот характеристик |
и |
|
вычис- |
||||
|
|
|
|
точки наносят на гра- |
|||
ляют разность координат. Полученные Ж< = |
|
Н< = |
|
||||
фик и соединяют отрезками прямых. Однако из-за простоты
внешних видов асимптотических ЛАЧХ Ж< = и Н< = данные построения здесь не приводятся.
16. На основании найденной асимптотической ЛАЧХ корректирующего устройства составление передаточной функции последовательного корректирующего устройства. Коэффициент
передачи этой функции определяют по ординате ЛАЧХ кор- |
||||||||||||||
ректирующего устройства при частоте |
|
V |
||||||||||||
|
|
|
, |
|
|
|
|
выполняться равенство: |
||||||
Очевидно также |
|
что должно |
|
|
|
|
|
1 с . |
||||||
Отсюда при |
w |
|
|
<x= w |
<x= · w |
|
<x=. |
|
||||||
|
|
Ж |
|
ž |
|
|
|
š |
|
|
|
|||
|
|
. В |
|
|
|
wЖ <x= |
|
|
wš <x= |
|
||||
|
wž <x= |
|
|
|
|
|
|
и |
|
|
|
|
не трудно опреде- |
|
|
|
известных |
|
|
|
|
|
|
|
|||||
лить |
|
|
|
результате передаточная функция корректи- |
||||||||||
рующего устройства (регулятора) частотного привода принимает следующий вид:
wЖ <x= |
|
8,5714 · <77,16 · 10V{x 2 1= |
. |
wž <x= wš <x= |
<0,011x 2 1= |
3.10.5. Синтез позиционного привода
Согласно заданию синтез позиционного привода следует выполнить с применением методики В. В. Солодовникова.
Данная методика применяется в случае отсутствия помех при ограничениях на время переходного процесса пп , перерегулирование и сводится к выбору одного из четырех типов ЛАЧХ желае-
-63-
мой разомкнутой астатической системы первого порядка.
Каждая типовая ЛАЧХ полностью определяется четырьмя параметрами: передаточным коэффициентом разомкнутой системы и со-
прягающими частотами:
¯j ; ¯P ; Q ¯P.
|
Однако удобнее пользоваться совокупностью следующих четырех |
|||||||||
параметров: ординаты |
|
при сопрягающей частоте , частоты среза |
||||||||
§ |
|
|
значений сопрягающих частот |
|
|
|||||
и относительных |
|
|
7j |
и |
7P |
|
|
|||
|
|
|
|
|
7° |
7°. |
|
|
|
|
|
При этом сопрягающая частота определяется соотношением |
|||||||||
|
|
|
<| 6 |
1=-± 77_° |
|
E:j 2 | · -± 77j° |
, |
|
|
|
где |
|
для ЛАЧХ первого и третьего типов и |
| 3 |
для ЛАЧХ вто- |
||||||
|
четвертого типов. |
|
|
|
|
|||||
рого|и 2 |
|
|
|
|
|
|
|
|||
Для типовых ЛАЧХ составлены номограммы, которые по пара-
.
метрам позволяют определить основные характеристики замкнутой системы: пп и
Ниже приводится последовательность действий, выполненных в процессе синтеза позиционного привода по данной методике.
1.Определение передаточной функции разомкнутой неизменяемой части системы и запись ее в zpk-форме.
»W = W21 * W22
Transfer function:
2.786e-007 s^3 + 0.003612 s^2
-----------------------------------------------------------
3.231e-012 s^6 + 8.376e-008 s^5 + 0.000543 s^4 + 0.002062 s^3
» W = zpk(W)
Zero/pole/gain:
86235.6738 s^2 (s+1.296e004)
---------------------------------------
s^3 (s+1.296e004) (s+1.296e004) (s+3.8)
Таким образом, приведенная к стандартному виду передаточная функция неизменяемой части системы будет иметь следующий вид:
-64-
wš <x= |
x · |
<77,16 · 10 |
V{ |
1,75 |
· <0,263x 2 1= |
. |
||||
2. Отыскание |
|
|
x 2 1= |
|
||||||
|
|
для каждого множителя сопрягающей частоты и |
||||||||
определение значения <0=: |
|
|
|
|
||||||
|
|
|
|
K |
0,263 3,8 с ; |
|
|
|||
|
|
|
и |
1 |
1 |
|
V |
|
|
|
|
и |
|
1 |
|
1 |
|
|
V |
; |
|
|
K 77,16 · 10V{ 12960с |
|
||||||||
<0= |
20lg 20lg1,75 4,86 дБ. |
|
||||||||
3.Построение асимптотической ЛАЧХ неизменяемой части системы. Из-за простоты получаемого графика асимптотической ЛАЧХ данное построение здесь не приводится.
4.Выбор типовой ЛАЧХ желаемой разомкнутой системы по виду асимптотической ЛАЧХ неизменяемой части системы. В данном конкретном случае выбрана третья типовая ЛАЧХ желаемой разомкнутой системы (см. Табл. 3.7).
Табл. 3.7. Третья типовая ЛАЧХ желаемой разомкнутой системы.
Асимптотическая ЖЛАЧХ |
Передаточная функция |
-1 |
|
|
|
|
|
ж<²жx 2 1= |
-2 |
|
|
|
|
|
|
|
|
|
|
|
wж x<Kжx 2 1=<KQжx 2 1= |
|
-1 |
|
|
§ |
Q |
|
|
-3 |
|
|
|
|||
5. Вычисление частоты среза с по номограммам для желаемой |
||||
асимптотической ЛАЧХ выбранного типа при выбранном зна- |
||||
чении и требуемом перерегулировании. Если задаться зна- |
||||
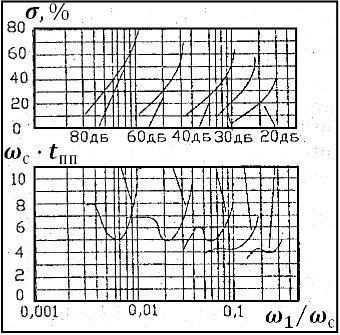
чением 20 дБ, то по номограммам для желаемой асим- |
||||
птотической ЛАЧХ третьего типа (см. Рис. 3.30) для требуемо- |
||||
го перерегулирования |
15% |
получается |
следующий ре- |
|
|
с |
|
3,8 |
V |
зультат: |
¬ 0,145 0,145 26,2 с . |
|||
0,145 |
||||
6.Вычисление времени переходного процесса пп по тем же номограммам для выбранного значения и рассчитанного зна-с
-65-
щий |
|
с |
. |
В данном конкретном случае получается следую- |
||
чения |
|
|||||
|
результат: |
3,8 |
3,8 |
|||
с · пп |
3,8 ¬ пп |
с |
26,2 0,145 с. |
|||
систем с желаемой |
|
|
|
|
|
|
|
|
от |
|
и |
с |
· пп |
от |
⁄ с |
для |
|||||
Рис. 3.30. Номограммы зависимостей |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
асимптотической ЛАЧХ третьего типа. |
|
||||||||||||||||
|
Требуемое время переходного процесса |
|
для синтезируемо- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
. |
Очевидно, что получившееся |
||||||||||
|
го электропривода равно |
|
|
|
|
|
|
пп |
|
|
|
|
|
||||||||
|
|
|
|
|
переходного процесса не превышает тре- |
||||||||||||||||
|
значение времени |
|
|
|
0,15 с |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
буемого значения и очень близко к нему. Поэтому значения |
||||||||||||||||||||
|
основных параметров будут иметь следующие значения: |
|
|
||||||||||||||||||
|
Для 20 дБ; |
ж |
3,8 с |
V |
; |
26,2 с |
. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
7. |
построения асимптотической желаемой ЛАЧХ разомкну- |
||||||||||||||||||||
|
20 дБ. |
|
|
|
|
|
|
ж откладывается ордината, равная |
|||||||||||||
|
той системы при частоте |
||||||||||||||||||||
|
|
|
|
|
|
|
|
точку |
проводится низкочастотная |
||||||||||||
|
|
Через |
найденную |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
асимптота с наклоном – 20 дБ/дек, а также вторая асимптота с |
||||||||||||||||||||
|
наклоном – 40 |
дБ/дек, соответствующим |
выбранному |
типу |
|||||||||||||||||
|
желаемой асимптотической ЛАЧХ. |
|
|
|
|
|
|
|
|
||||||||||||
8. |
Через частоту среза с проводится среднечастотная асимптота |
||||||||||||||||||||
с наклоном – 20 дБ/дек.
9.По точке пересечения среднечастотной асимптоты и второй
-66-
асимптоты определяется вторая сопрягающая частота желаемой ЛАЧХ. В данном конкретном случае получается следую-
щий результат: |
|
|
ж |
4,7 с |
V |
. |
|||
Значение ж |
|
|
|||||||
|
|
|
|
|
|
|
2 | · -± ж. |
||
|
<| 6 1=-± ж |
||||||||
|
|
проверяется по формуле: |
|||||||
|
|
|
ж |
|
§ |
20 |
|
4,7 |
|
Результаты проверки: |
|
§ |
|||||||
|
<| 6 1=-± § |
<2 6 1=-± 26,2 „ 60,74. |
|||||||
ж |
20 |
|
|
|
3,8 |
„ 1 6 2,79 „ 60,68. |
|||
20 |
2 | · -± § |
20 |
2 2 · -± 26,2 |
||||||
Таким образом, проверка значения второй сопрягающей частоты дает положительный результат.
10. Вычисление третьей сопрягающей частоты желаемой ЛАЧХ и построение высокочастотной асимптоты. Справа среднечас-
тотная асимптота ограничена частотой
Qж 4 · с 4 · 26,2 104,8 сV .
От этой частоты откладывается высокочастотная асимптота с
наклоном – 60 |
дБ/дек. |
|
|
|
|
|
V . В данном |
|
11. Определение |
величины |
|
на |
|
частоте |
|
||
|
|
получается |
|
Значение удовлетво- |
||||
конкретном случае |
|
|
|
|
|
1 с |
|
|
ряет требованиям, так как оно |
больше заданного значения. |
|||||||
|
30. |
|
|
|||||
12. Принятие заключения о виде передаточной функции желае-
мой ЛАЧХ разомкнутой30системы· <0,213x: 2 1=
wЖ <x= x · <0,263x 2 1= · <0,0095x 2 1= .
13. Определение ЛАЧХ корректирующего устройства. Для этого следует найти разность желаемой ЛАЧХ разомкнутой системы
и ЛАЧХ неизменяемой< = части< =системы< =Ж 6 š КУ : .
В общем случае это удобно сделать графически. Однако здесьтакже< =из-за<простоты= внешних видов асимптотических ЛАЧХ Ж и š соответствующие построения не приводятся.
14. На основании найденной асимптотической ЛАЧХ корректи-
-67-

рующего устройства составление передаточной функции по- |
||||||||||||||||
следовательного корректирующего устройства. Коэффициент |
||||||||||||||||
передачи этой функции определяют по ординате ЛАЧХ кор- |
||||||||||||||||
ректирующего устройства при частоте |
|
|
V |
|
||||||||||||
|
|
|
|
, |
|
|
|
|
выполняться равенство: |
|
||||||
Очевидно также |
|
что должно |
|
|
|
|
ω 1 с . |
|
||||||||
Отсюда при |
w |
|
|
<x= w |
<x= · w |
|
<x=. |
|
|
|
||||||
|
|
|
Ж |
|
ž |
|
|
š |
|
|
|
|
|
|||
|
|
. В |
|
|
|
wЖ<x= |
|
wš<x= |
|
|
|
|||||
|
wž<x= |
|
|
|
|
|
|
|
и |
|
|
|
не трудно опреде- |
|||
|
|
известных |
|
|
|
|
|
|
||||||||
лить |
|
|
|
|
результате передаточная функция корректи- |
|||||||||||
рующего устройства (регулятора) позиционного привода при- |
||||||||||||||||
нимает следующий вид: |
|
|
|
|
|
|
· <77,16 · 10V{x 2 1= |
|
||||||||
|
wЖ<x= |
|
17,1429 · <0,213x 2 1= |
|
||||||||||||
wž<x= wš<x= |
|
|
|
|
|
|
|
<0,0095x 2 1= |
|
. |
||||||
3.11. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ СИНТЕЗИРОВАННЫХ ПРИВОДОВ
3.11.1. Передаточные функции частотного привода
На основании полученной ранее структурной схемы частотного привода, представленной в стандартном одноконтурном виде (см. Рис. 3.27), можно определить передаточные функции частотного привода
по задающему воздействию и по возмущающему воздействию: |
|
wЖ<x= |
wž<x= · w <x= · w <x= |
†y<x= 1 2 wЖ<x= 1 2 wž<x= · w <x= · w <x= ; |
|
w <x= |
w <x= |
†´<x= 1 2 wЖ<x= 1 2 wž<x= · w <x= · w <x=.
Ниже приведены результаты вычисления в среде MATLAB этих передаточных функций:
» Wz1 = tf([15], conv([0.263, 1], [0.011, 1]))
Transfer function: 15
--------------------------
0.002893 s^2 + 0.274 s + 1
» Fu1 = Wz1 / (1 + Wz1)
Transfer function:
0.0434 s^2 + 4.11 s + 15
-68-
---------------------------------------------------------
8.369e-006 s^4 + 0.001585 s^3 + 0.1243 s^2 + 4.658 s + 16
»W1 = tf([1], [0.0000017974, 0.0233]);
»W2 = tf([0.155], [1, 0]);
»W3 = tf([0.571], [1]);
»W12 = W2 / (1 + W1 * W2 * W3)
Transfer function:
2.786e-007 s^2 + 0.003612 s
--------------------------------------
1.797e-006 s^3 + 0.0233 s^2 + 0.0885 s
» Ff1 = W12 / (1 + Wz1)
Transfer function:
8.06e-010 s^4 + 1.052e-005 s^3 + 0.0009898 s^2 + 0.003612 s
-----------------------------------------------------------
5.2e-009 s^5 + 6.79e-005 s^4 + 0.006669 s^3 + 0.3971 s^2 + 1.416 s
3.11.2. Передаточные функции позиционного привода
На основании полученной ранее структурной схемы позиционного привода, представленной в стандартном одноконтурном виде (см. Рис. 3.29), можно найти передаточные функции позиционного привода
по задающему воздействию и по возмущающему воздействию: |
|
wЖ<x= |
wž<x= · w <x= · w <x= |
†y<x= 1 2 wЖ<x= 1 2 wž<x= · w <x= · w <x= ; |
|
w <x= |
w <x= |
†´<x= 1 2 wЖ<x= 1 2 wž<x= · w <x= · w <x=.
Ниже приведены результаты вычисления в среде MATLAB этих передаточных функций:
»p1 = conv([30], [0.213, 1]);
»p2 = conv([0.263, 1, 0], conv([0.0095, 1], [0.0095, 1]));
»Wz2 = tf(p1, p2)
Transfer function:
6.39 s + 30
---------------------------------------------
-69-
2.374e-005 s^4 + 0.005087 s^3 + 0.282 s^2 + s
» Fu2 = Wz2 / (1 + Wz2)
Transfer function:
0.0001517 s^5 + 0.03322 s^4 + 1.955 s^3 + 14.85 s^2 + 30 s
-----------------------------------------------------------
5.634e-010 s^8 + 2.415e-007 s^7 + 3.927e-005 s^6 + 0.003068 s^5 + 0.1229 s^4 + 2.519 s^3 + 15.85 s^2 + 30 s
»W1 = tf([1], [0.0000017974, 0.0233]);
»W2 = tf([0.155], [1, 0, 0]);
»W3 = tf([0.571, 0], [1]);
»W22 = W2 / (1 + W1 * W2 * W3)
Transfer function:
2.786e-007 s^3 + 0.003612 s^2
----------------------------------------
1.797e-006 s^5 + 0.0233 s^4 + 0.0885 s^3
» Ff2 = W22 / (1 + Wz2)
Transfer function:
6.613e-012 s^7 + 8.714e-008 s^6 + 1.845e-005 s^5 + 0.001019 s^4 + 0.003612 s^3
-----------------------------------------------------------
4.266e-011 s^9 + 5.622e-007 s^8 + 0.0001211 s^7 + 0.007034 s^6 + 0.1972 s^5 + 1.353 s^4 + 2.655 s^3
3.12. ОПРЕДЕЛЕНИЕ ВРЕМЕННЫХ И ЧАСТОТНЫХ ХАРАКТЕРИСТИК СИНТЕЗИРОВАННЫХ ПРИВОДОВ
Ниже приводятся результаты построения в среде компьютерного |
||||||||
моделирования MATLAB временных и частотных характеристик час- |
||||||||
|
†y<x= |
|
†´<x= |
|
†y<x= |
|
†´<x= |
|
тотного и позиционного приводов по каждой из четырех полученных |
||||||||
ранее передаточных функций: |
|
, |
|
, |
|
, |
|
. Результа- |
ты построения приводятся в виде графиков на Рис. 3.31 – |
Рис. 3.42. |
|||||||
-70-